




| 技術名稱 | 仿人機器人手臂及智慧抓取關鍵技術 | ||
|---|---|---|---|
| 計畫單位 | 國立清華大學 | ||
| 計畫主持人 | 張禎元 | ||
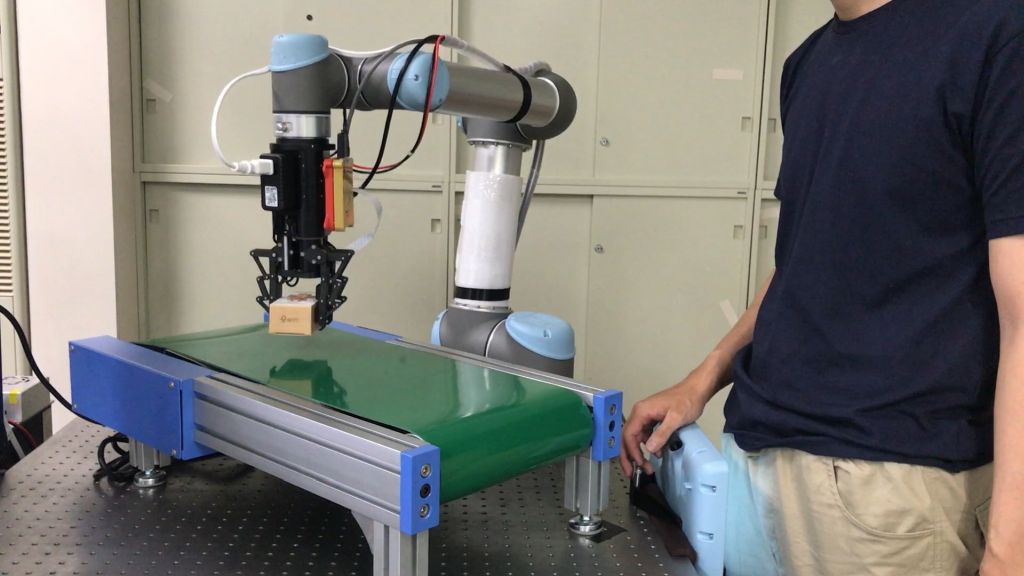
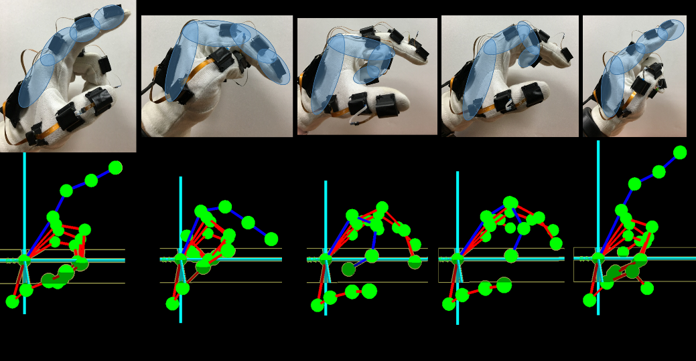
| 技術簡介 | 擬人動作與智慧抓取為智慧製造中機器人的關鍵技術,本技術透過專利穿戴式傳感器融合,人體三維即時姿態與動作得以紀錄與分析,進而經由7軸仿人機器手臂與靈巧手,進行擬人運動及抓握之智慧控制。透過一爪多用的自適應夾爪與內嵌式視覺辨識模組的智能融合,對於產線上不同形狀之物體,機器人可智慧判斷並進行最適當的抓取。 |
||
| 科學突破性 | 1.穿戴式傳感器融合技術能即時量測並記錄人類3D動作 2.類人形機械結構設計符合人類上肢生物力學,使機器手臂與靈巧機器人手可模仿人類動作,進行擬人抓握 3.自適應夾爪設計,可隨不同物件做出不同抓取動作,可一爪多用 4.內嵌視覺辨識模組,可減少遮蔽並判斷物件形狀及位置,使智慧夾爪能迅速且確實自動夾取 |
||
| 產業應用性 | 1.專利穿戴感測技術可記錄人體動作,透過AI與分析可應用於製造、運動、醫療、文創等領域 2.遠端遙控擬人機械手臂能應用在危險環境提升安全並彌補人力不足 3.具內嵌視覺辨識模組之自適應夾爪能智能辨識物件,自動調整最適的夾取方式,並可直接快速導引機械手臂運作、提升夾取成功率,並提供智慧製造所需泛用性的 |
||
| 關鍵字 | 擬人形機器人 順/逆向運動解 路徑規劃 感測器訊號融合 動作擷取 近場感測系統 物件辨識 自適應夾爪 欠驅動夾爪 視覺導引系統 | ||
- 聯絡人
- 張賢廷
- 電子信箱
- htchang@gapp.nthu.edu.tw








