




| Technical Name | Technology of anthropomorphic robotic armintelligent grasping | ||
|---|---|---|---|
| Project Operator | National Tsing Hua University | ||
| Project Host | 張禎元 | ||
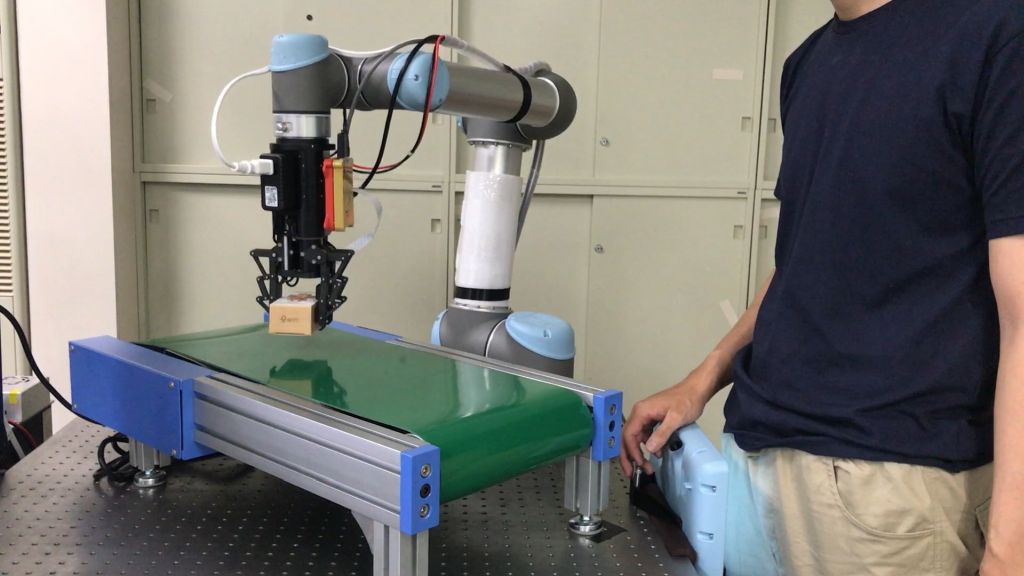
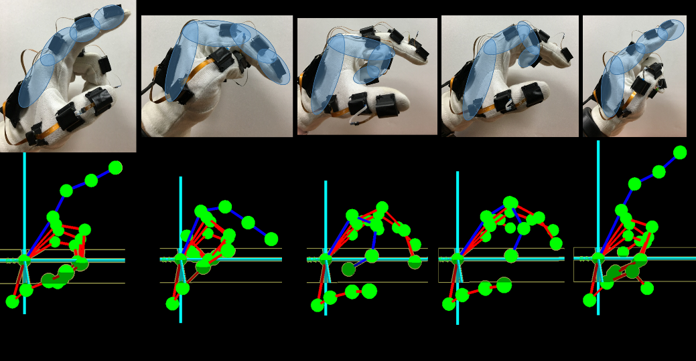
| Summary | Through patented wearable sensor fusion technology, human 3D motions can be captured in real-time which allow 7-DOF robotic armdexterous robotic hand to perform anthropomorphic motiongrasping action. Integrated with eye-in-hand visual module, the adaptive gripper can intelligently decide optimal grasping strategy to ensure success grasping of arbitrary shape of objects in smart manufacturing applications. |
||
| Scientific Breakthrough | 1. Sensor fusion technology allows real-time capturing of human 3D motion. 2. Humanoid mechanical design with biomechanics allows mimicking human motionanthropomorphic grasping by the bionic arm/hand. 3. Adaptive gripper design allows performing different grasping actions without change of adaptor. 4. Embedded vision module allows smart identification of shapeposition of random objects for best grasping. |
||
| Industrial Applicability | 1. Sensor fusion technology allows recording human motion, which can be implemented in manufacturing, sport, medical,cultural fields. 2. The robotic arm/hand can be controlled to conduct anthropomorphic action, especially in hazardous environments where safety & manpower shortages are of concern. 3. The eye-in-hand adaptive gripper can identify object’s shapedetermine the best strategy for quickaccuracy grasping in manufacturing. |
||
| Keyword | Anthropomorphic robotic arm Forward/Inverse kinematic Path planning Sensor fusion Motion capture Proximity sensor Object Recognition Adaptive Gripper Underactuated Gripper Vision navigation | ||
- htchang@gapp.nthu.edu.tw
other people also saw








