



| 技術名稱 | 基於電腦視覺的自動化焊接人機協作系統 | ||
|---|---|---|---|
| 計畫單位 | 國立成功大學 | ||
| 計畫主持人 | 沈揚庭 | ||
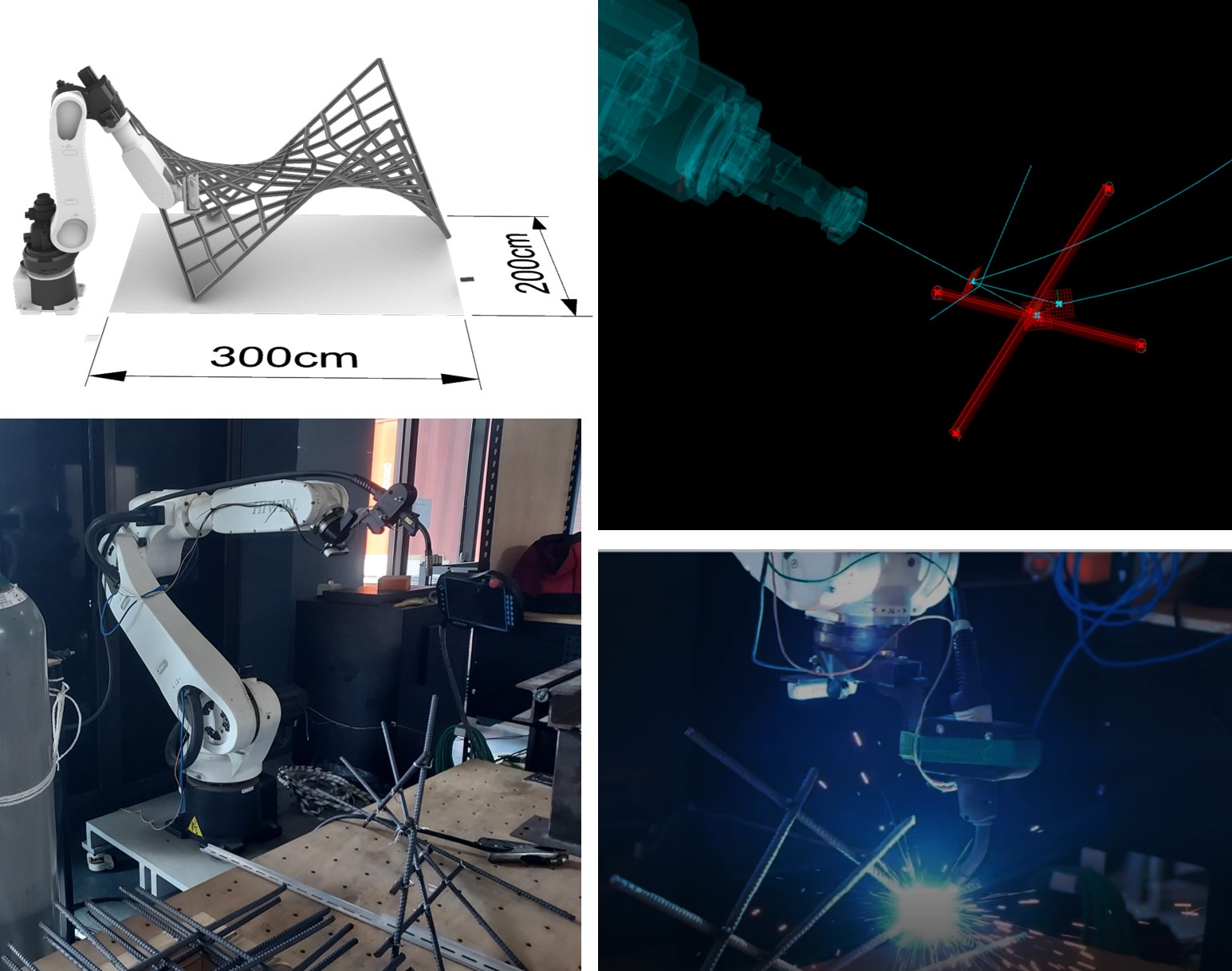
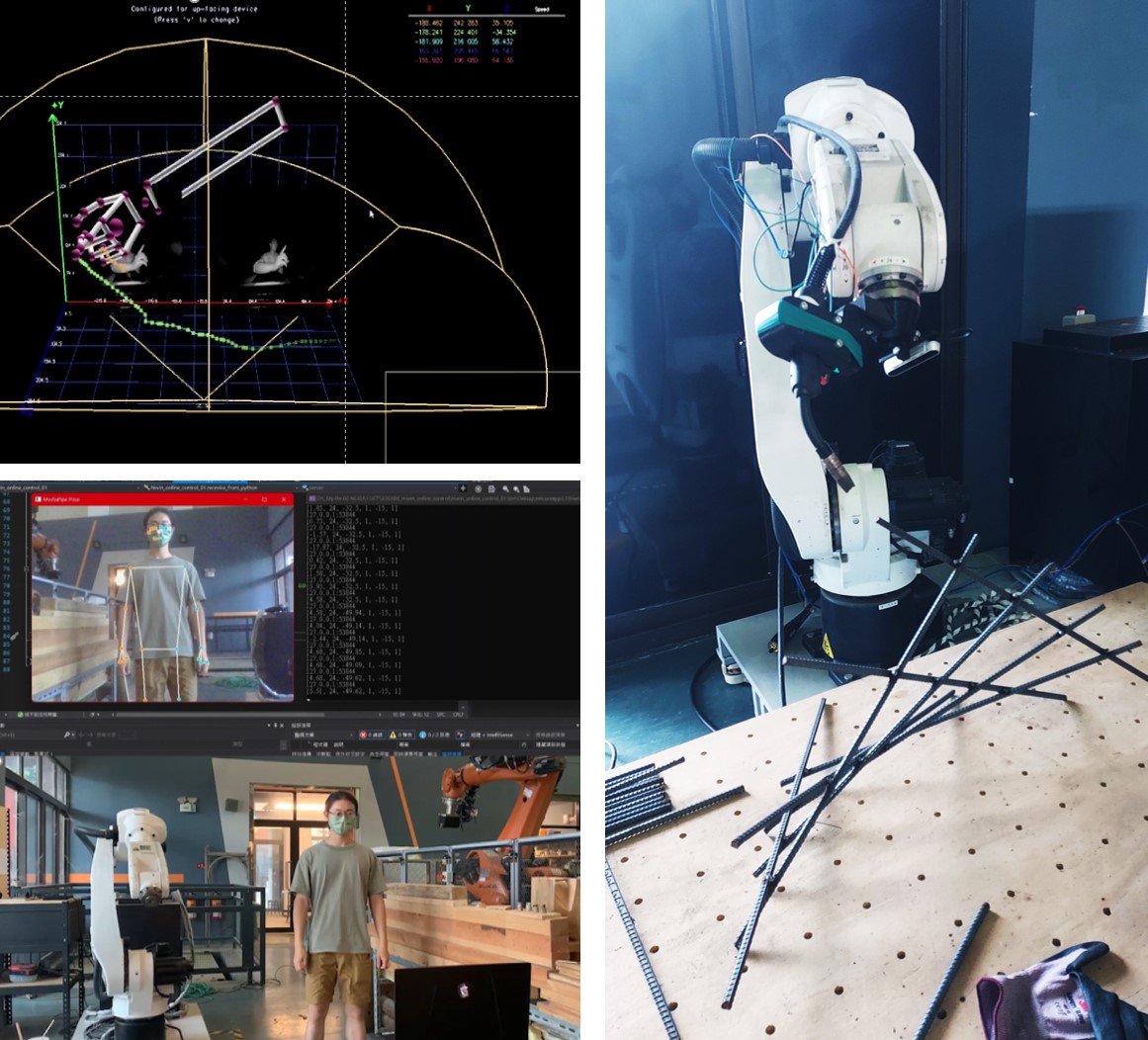
| 技術簡介 | 本計畫透過「基於電腦視覺的人機協作自動化焊接系統」的專案主題,將電腦視覺運用在(1)骨架辨識與(2)焊點查找兩個面向,使得操作者可以用直覺的肢體語言,以免編程及非接觸式的模式引導機械手臂到達指定的焊點位置進行自動化的複雜曲面焊接,實現直覺化、自動化、客製化的人機協作焊接工法應用。 |
||
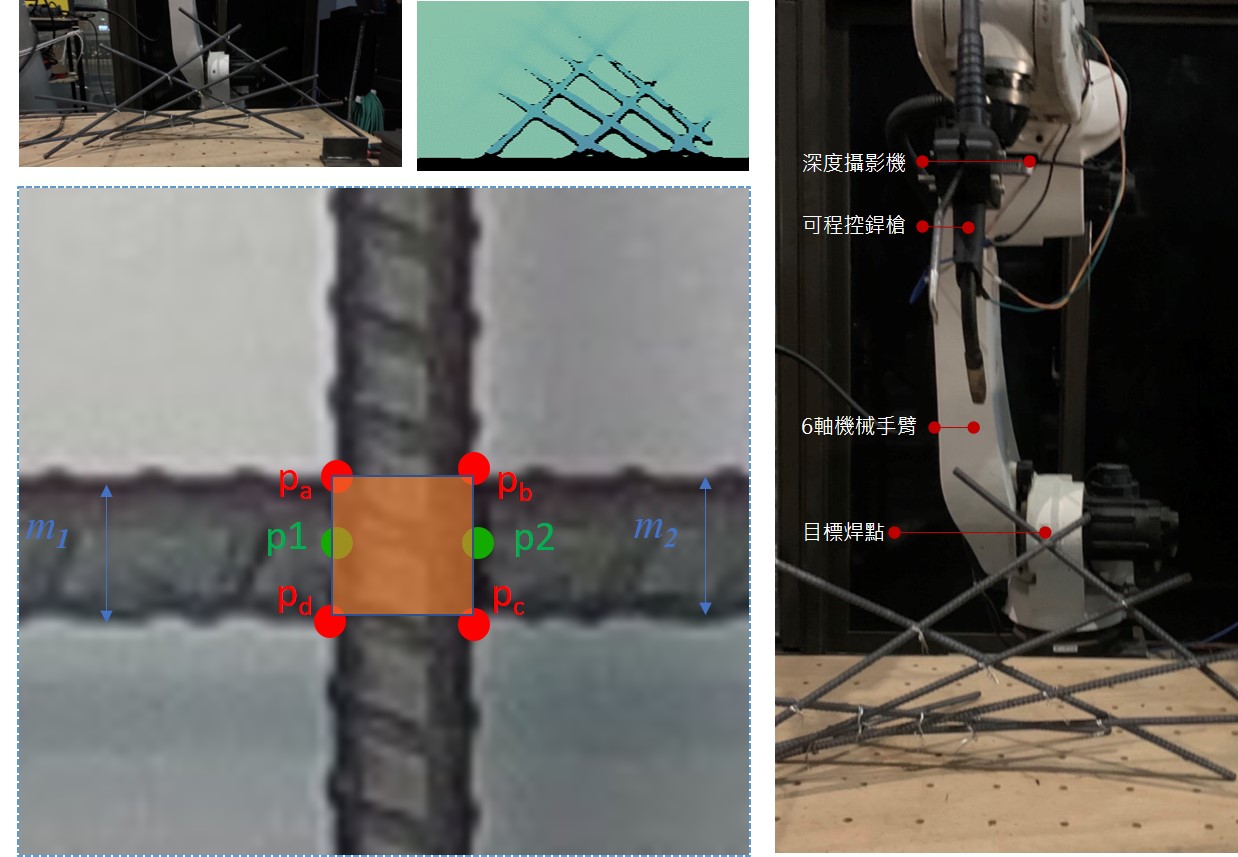
| 科學突破性 | 本研究發展基於電腦視覺的自動化焊接人機協作系統。最大的技術突破之一在於導入電腦視覺的所促成的直覺化、自動化、客製化應用。本研究所使用的電腦視覺極其連動技術包括(1)骨架辨識應用於直覺化機械手臂控制、(2)空間深度辨識應用於焊點自動查找與路徑規劃。 |
||
| 產業應用性 | 在產業應用面上,預期可以直接應用於鋼網牆工法的鋼筋網格自動化焊接,改善過往因勞力密集而成本高昂的焊接工法,進一步使半乾式的預製鋼網牆能成為營建產業的新興工法,減少濕式工法的使用進而降低營建過程中的碳排,達到低碳建築的總體目標。 |
||
| 關鍵字 | 人機協作 機械手臂 電腦視覺 骨架辨識 智慧營建 自動焊接 數位轉型 低碳工法 鋼網牆 逆向動力學 | ||
- 聯絡人
- 沈揚庭
- 電子信箱
- bowbowyangting@gmail.com







