



| Technical Name | The Auto-welding Human-Robot Collaboration System Based on Computer Vision | ||
|---|---|---|---|
| Project Operator | National Cheng Kung University | ||
| Project Host | 沈揚庭 | ||
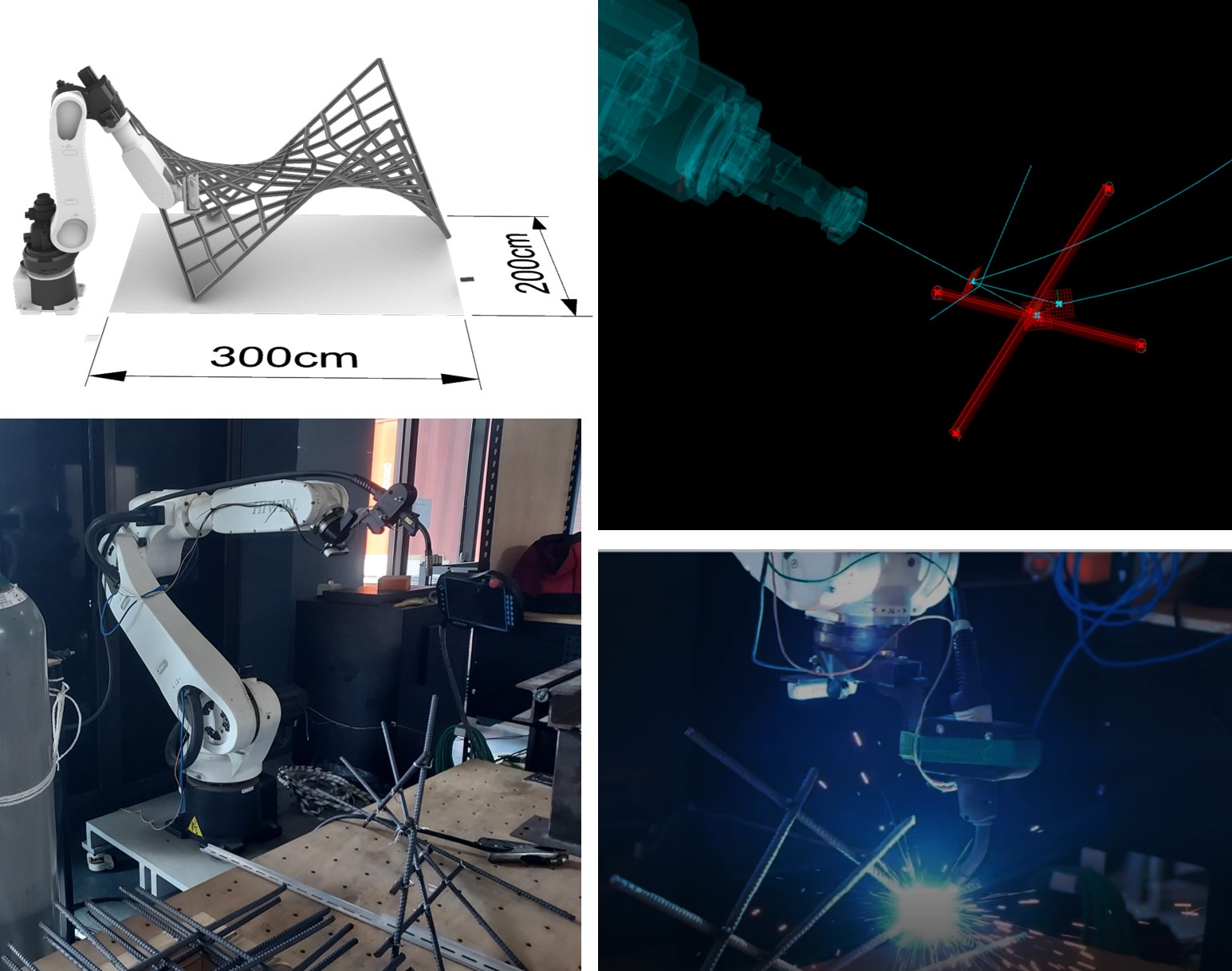
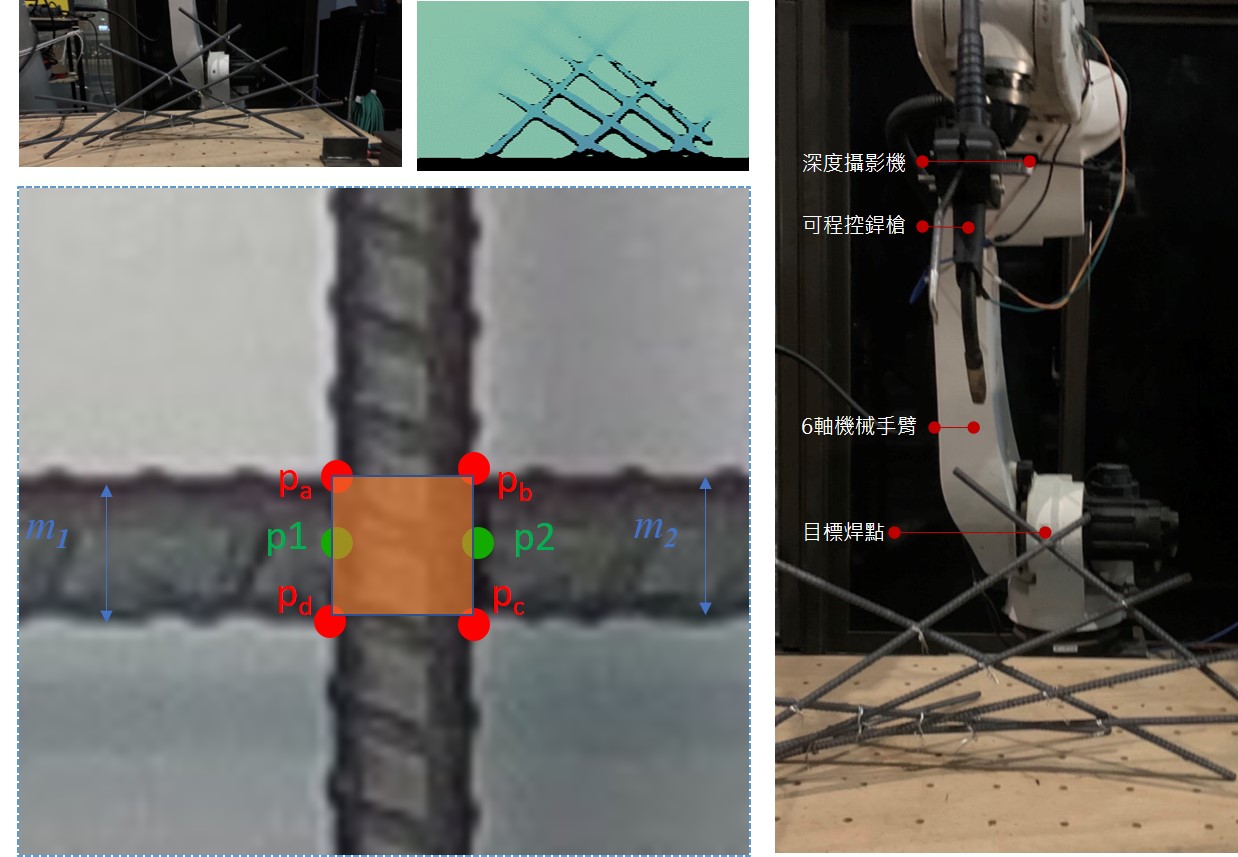
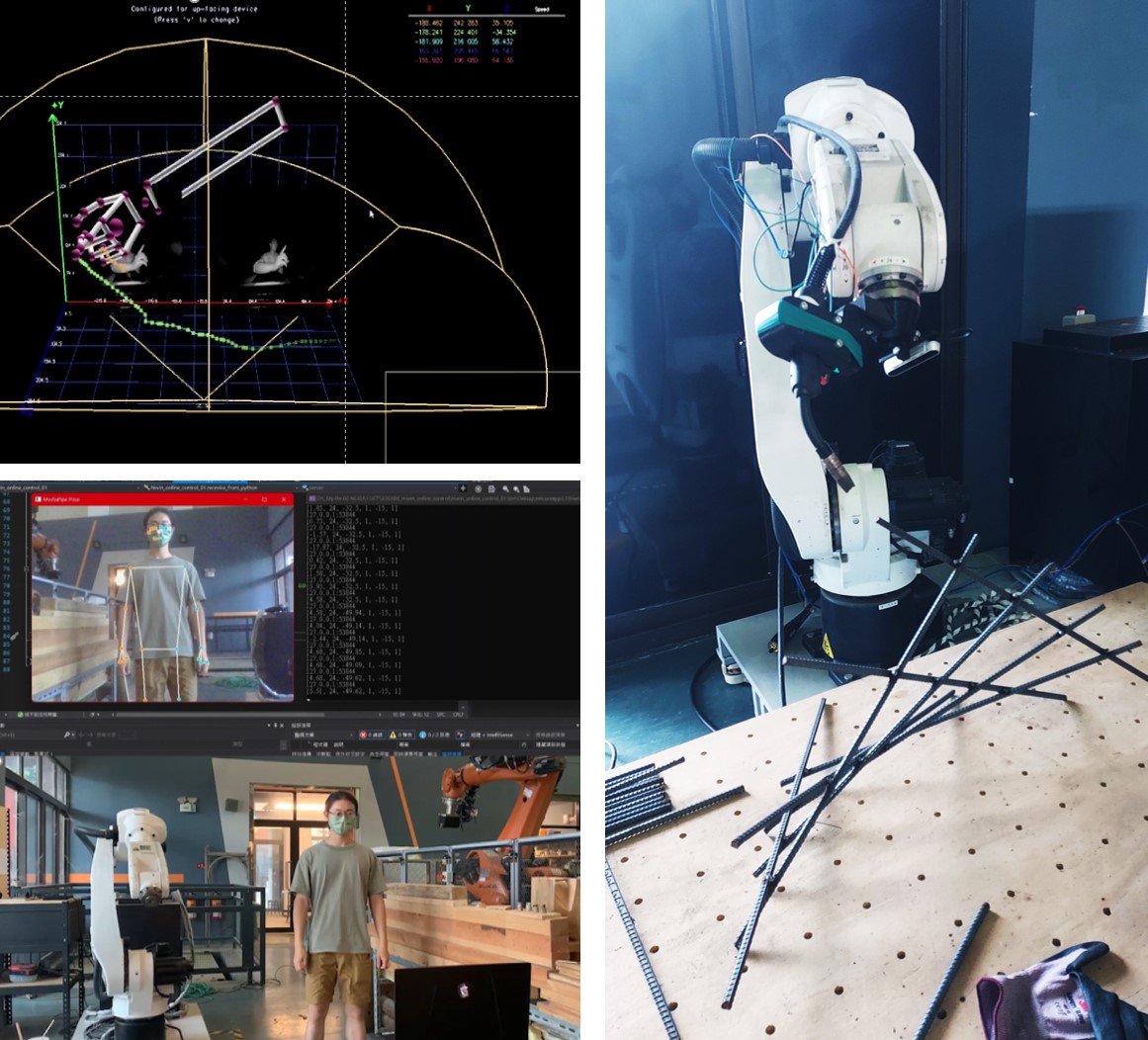
| Summary | This project, with the theme of "Computer Vision-Based Human-Machine Collaborative Automation Welding System," applies computer vision in two aspects: (1) skeleton recognition(2) weld point identification. It allows the operator to intuitively guide the robotic arm to the specified weld point using body language, without the need for programmingin a non-contact manner. This enables automated complex curved surface weldingachieves the human-robot collaborative welding method. |
||
| Scientific Breakthrough | This research focuses on developing a computer vision-based automated welding human-robot collaborative system. One of the key technological breakthroughs lies in the integration of computer vision, enabling intuitive, automated,customizable applications. The computer vision techniques utilized in this research include (1) skeleton recognition for intuitive control of the robotic arm(2) spatial depth recognition for automatic weld point detectionpath planning. |
||
| Industrial Applicability | The system can be directly applied to the automated welding of steel mesh walls. This will improve the previous labor-intensivecostly welding methods, further establishing semi-dry prefabricated steel mesh walls as an emerging construction method in the building industry. By reducing the use of wet construction methods, it will help lower carbon emissions in the construction processachieve the overall goal of low-carbon buildings. |
||
| Keyword | Human-Robot Collaboration Robotic Arm Computer Vision Skeleton Recognition Smart Construction Auto Welding Digital Transformation Low Carbon Construction Method Steel Mesh Wall Inverse Kinematics | ||
- Contact
- Shen, Yang-Ting
- bowbowyangting@gmail.com
other people also saw







