



| Technical Name | 應用於自駕模型賽車之深度強化式學習技術 | ||
|---|---|---|---|
| Project Operator | National Yang Ming Chiao Tung University | ||
| Project Host | 吳毅成 | ||
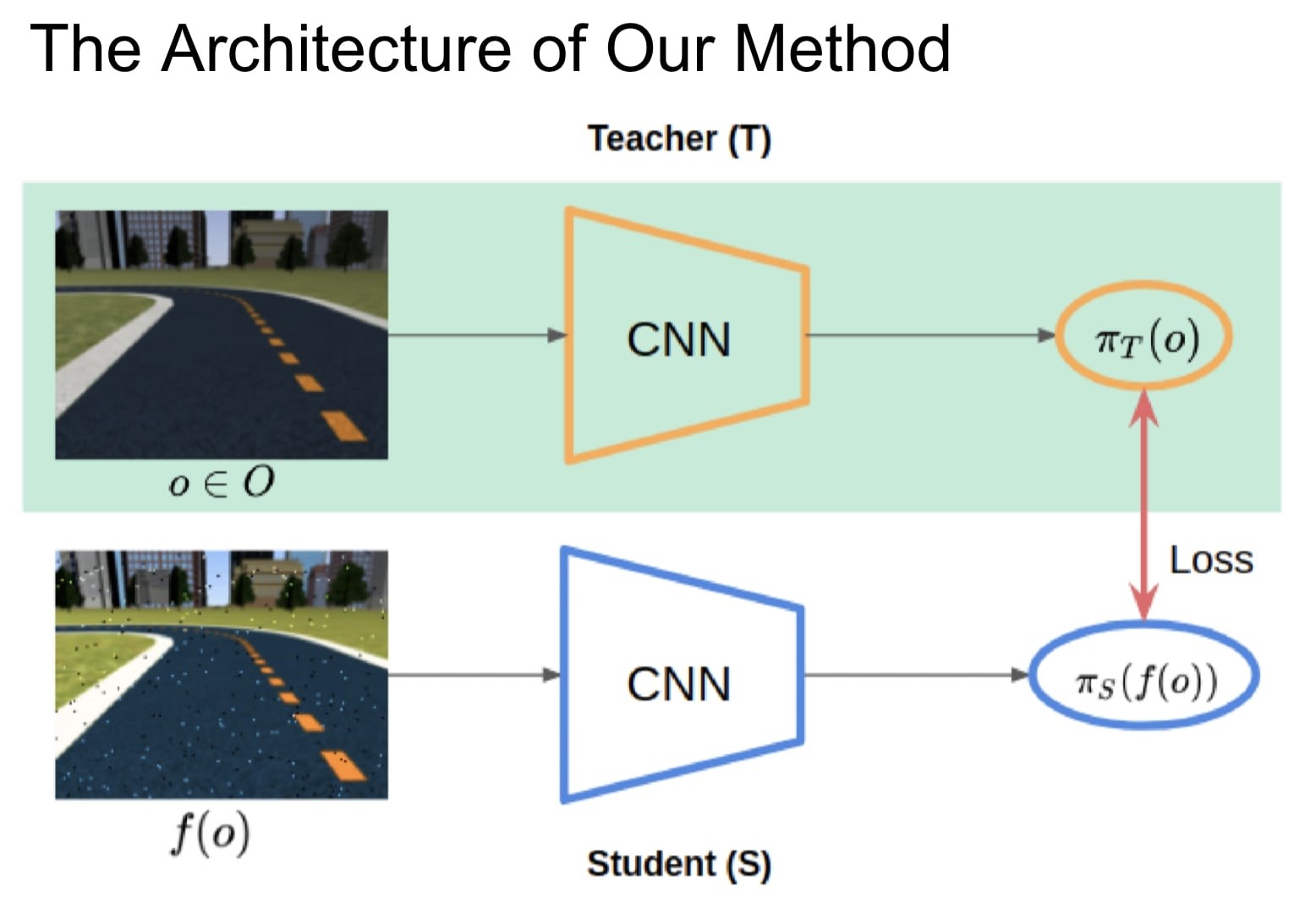
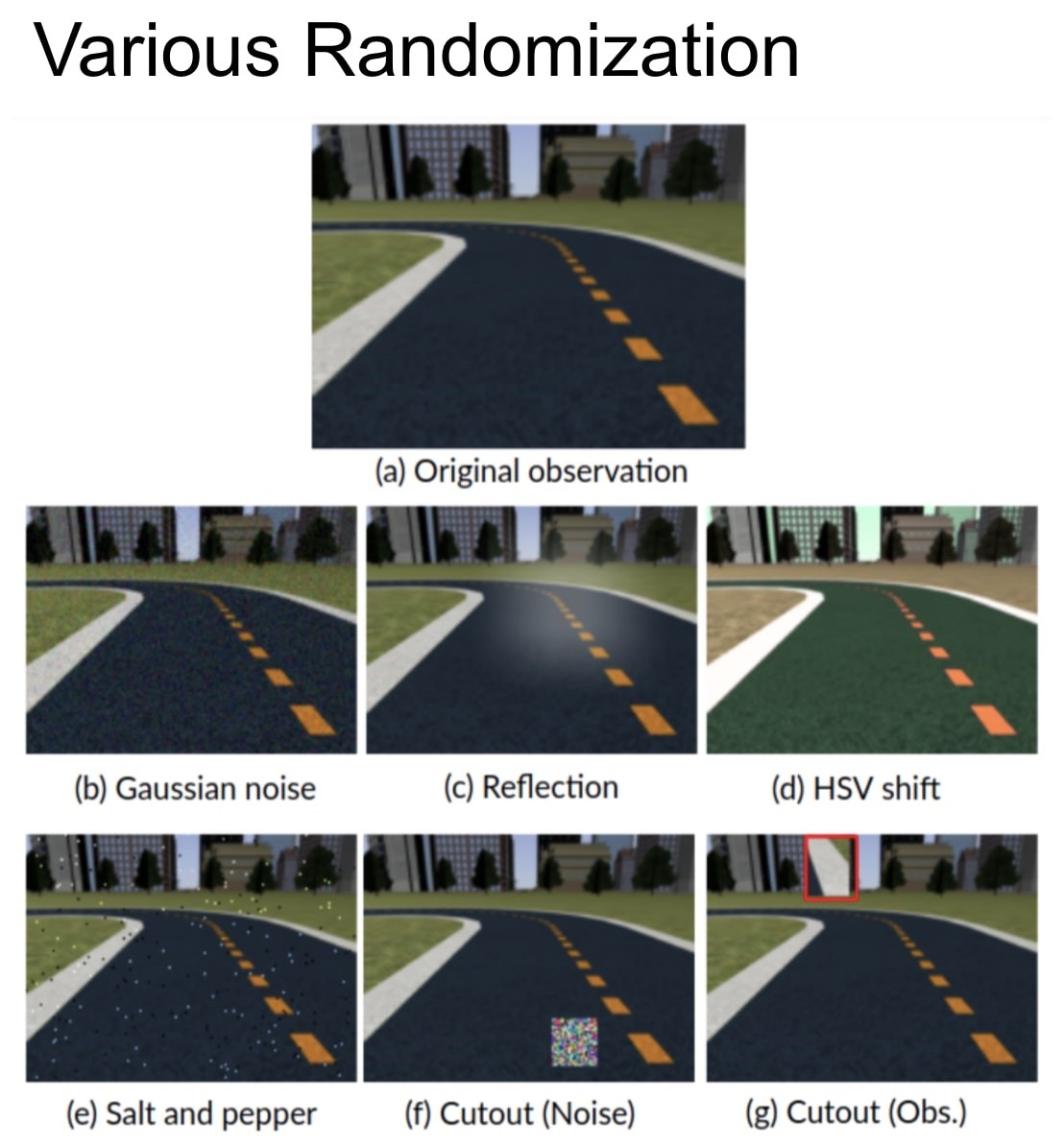
| Summary | We develop an image-based sim-to-real transfer technique for deep reinforcement learning. First, we train a teacher model to move along a near optimal path. We then use this model to teach a student model the correct actions along with randomization. The technique bridges the sim-to-real gap, improving the driving speedrobustness of the simulator-trained student model in the real world. |
||
| Technical Film |
|
||
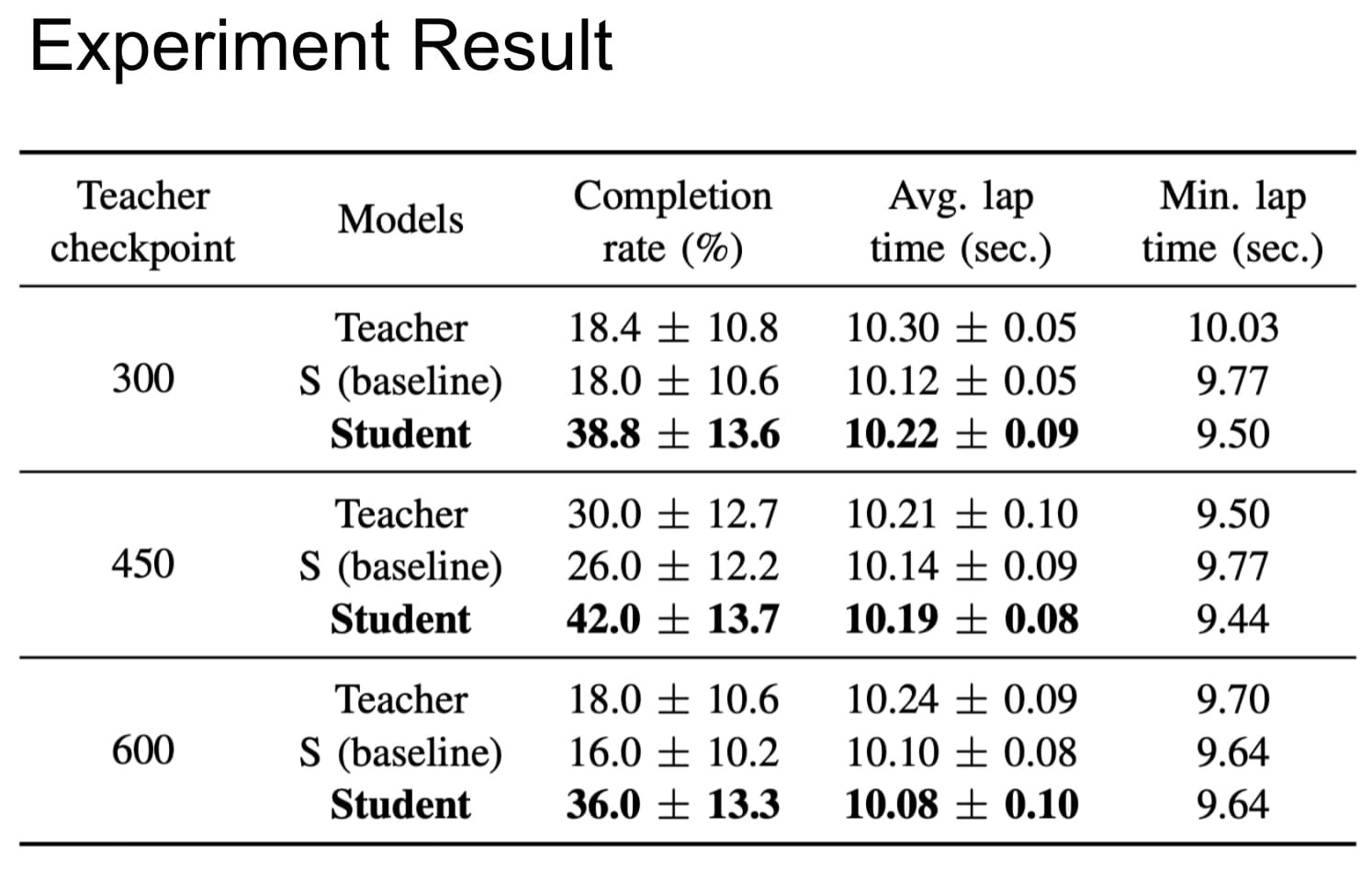
| Scientific Breakthrough | The sim-to-real transfer technique we proposed can bridge the sim-to-real gap in miniature autonomous car racing. The breakthrough is that we can boost the robustness of a simulator-trained model without compromising racing lap times in the real world. We published the research result in IROS 2020 (Workshop)achieved great success in AWS DeepRacer races. |
||
| Industrial Applicability | This technique bridges the sim-to-real gapincreases the feasibility of using deep reinforcement learning for real-world applications. The autonomous driving technique can be applied to racing cars in the International Federation of Model Auto Racing (IFMAR) to make the competition more attractive. Besides, it can be applied to automated guided vehicles (AGV) in the production line for the low costrapid deployment. Moreover, it can be applied to the rescueexploration missions in high-risk environments such as rough terrain, to improve the efficiencythe region of rescue. |
||
| Matching Needs | 天使投資人、策略合作夥伴 |
||
| Keyword | Deep Learning Reinforcement Learning Deep Reinforcement Learning Neural Network Artificial Intelligence Autonomous Car Racing Sim-To-Real Transfer End-to-End Learning Data Augmentation Proximal Policy Optimization (PPO) | ||
- cindyko@nycu.edu.tw
other people also saw







