:::
- 首頁
- /
- 年度
- /
- 2018
- /
- AI智慧應用&電子&光電
- /
- 從二維影像估測三維房間佈局架構及三維相機定位




| 技術名稱 | 從二維影像估測三維房間佈局架構及三維相機定位 | ||
|---|---|---|---|
| 計畫單位 | 國立清華大學 | ||
| 計畫主持人 | 賴尚宏 | ||
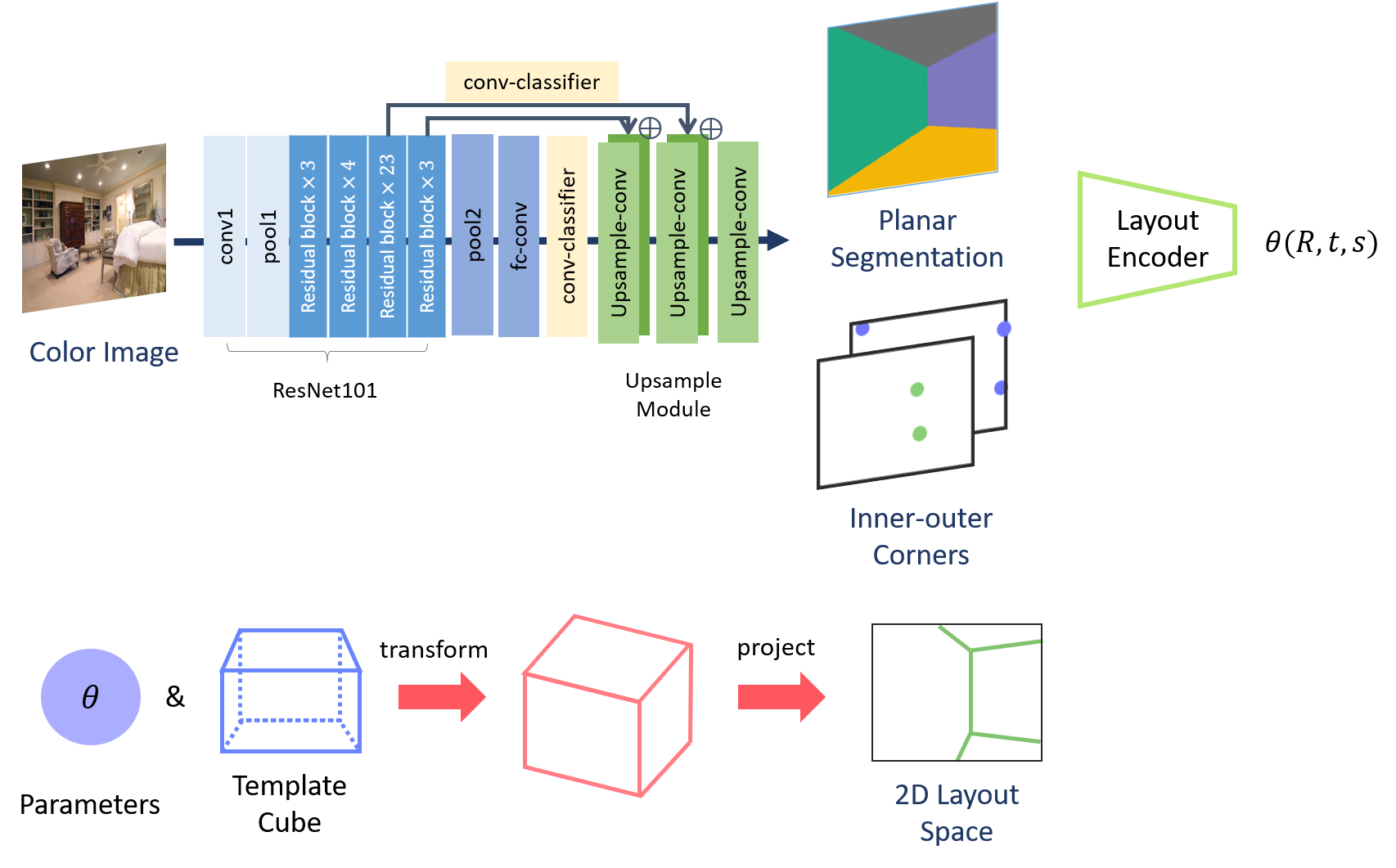
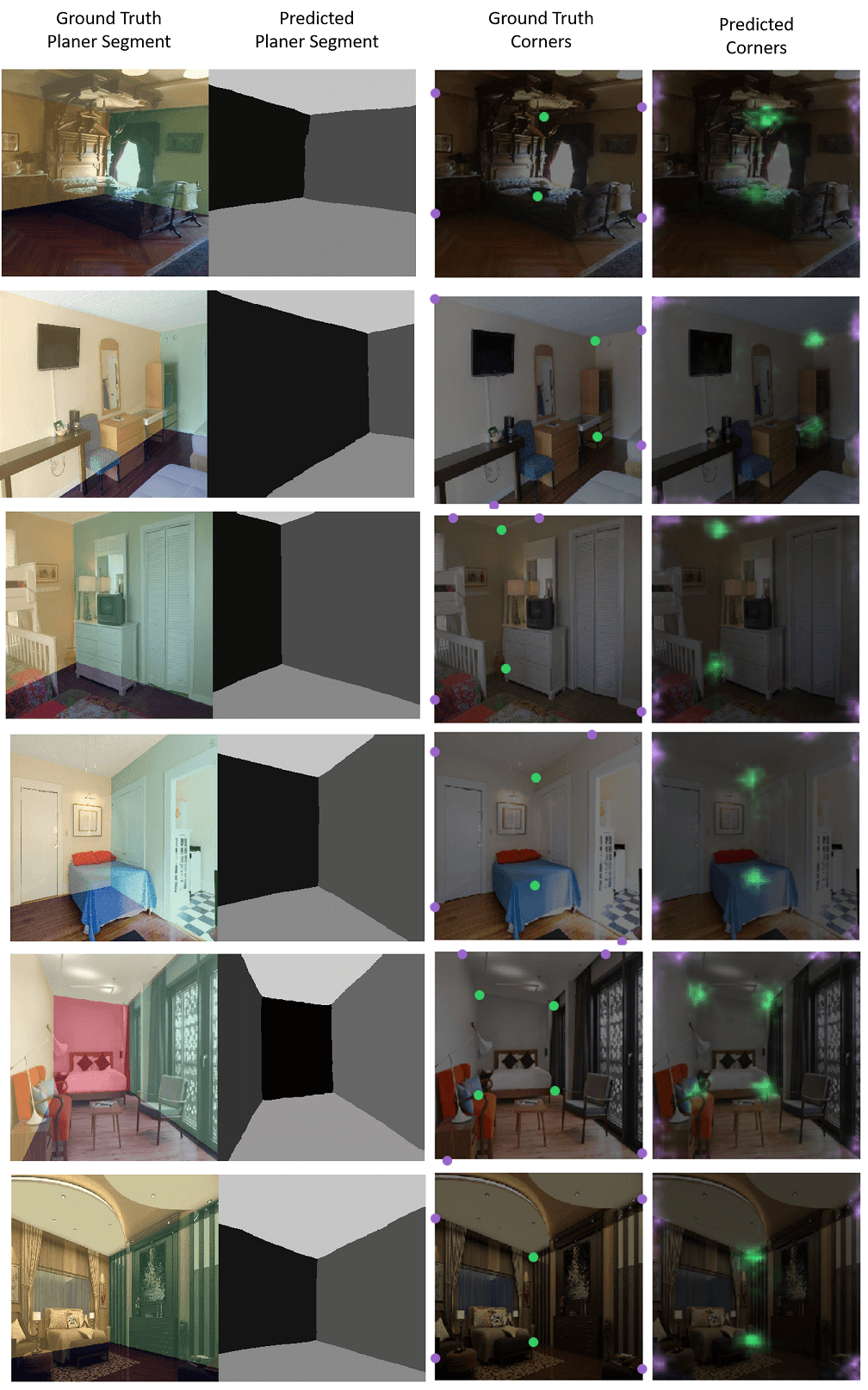
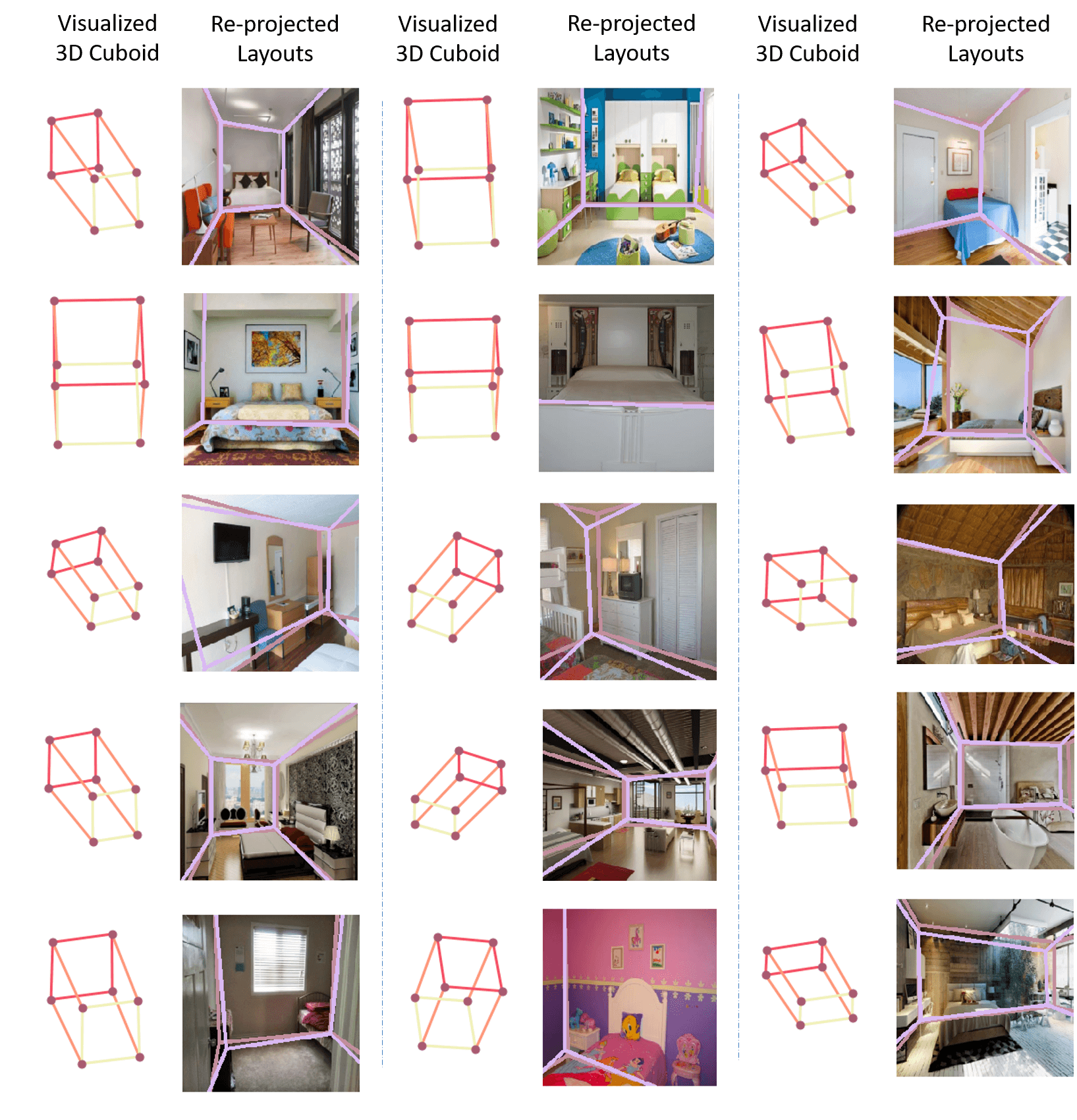
| 技術簡介 | 我們提出了一個具有深度網路的幾何感知框架來估測二維及三維空間中的室內佈局。我們將佈局估測的任務分為兩個階段的深度學習網路,首先從單張影像估測二維房間佈局,然後估測相對應之三維佈局長方體模型參數。我們的實驗證實所提出的模型不僅可以提供有競爭力的二維佈局估測,而且可以提供實時的三維房間佈局估測。 |
||
| 科學突破性 | 此技術主要建立在從單張二維影像可估測三維室內房間幾何結構的創新框架,我們將三維房間架構估測分解為兩個階段,首先估測2D的房間佈局,然後估測3D房間模型長方體參數。這是一個創新的系統架構,適合用深層網路模型來實現完成。此方法適用於即時三維房間架構估測,具有準確性高以及計算速度快等優點。 |
||
| 產業應用性 | 此技術可應用在許多需要從二維室內影像進行即時的三維重建以及室內定位的相關應用,譬如機器人在室內的導航,可從二維室內影像建立三維場景的模型以及達到機器人的三維定位,亦可用在擴增實境或虛擬實境的應用皆需要即時的攝影機及房間的相對三維幾何關係以提供即時的攝影機或使用者的三維定位。 |
||
| 關鍵字 | |||
- 聯絡人
- 楊善淳
- 電子信箱
- futuretech.most@gmail.com
其他人也看了