



| Technical Name | Deep Reinforcement Learning with Action SmoothnessIts Application to Autonomous Miniature Car Racing | ||
|---|---|---|---|
| Project Operator | National Yang Ming Chiao Tung University | ||
| Project Host | 吳毅成 | ||
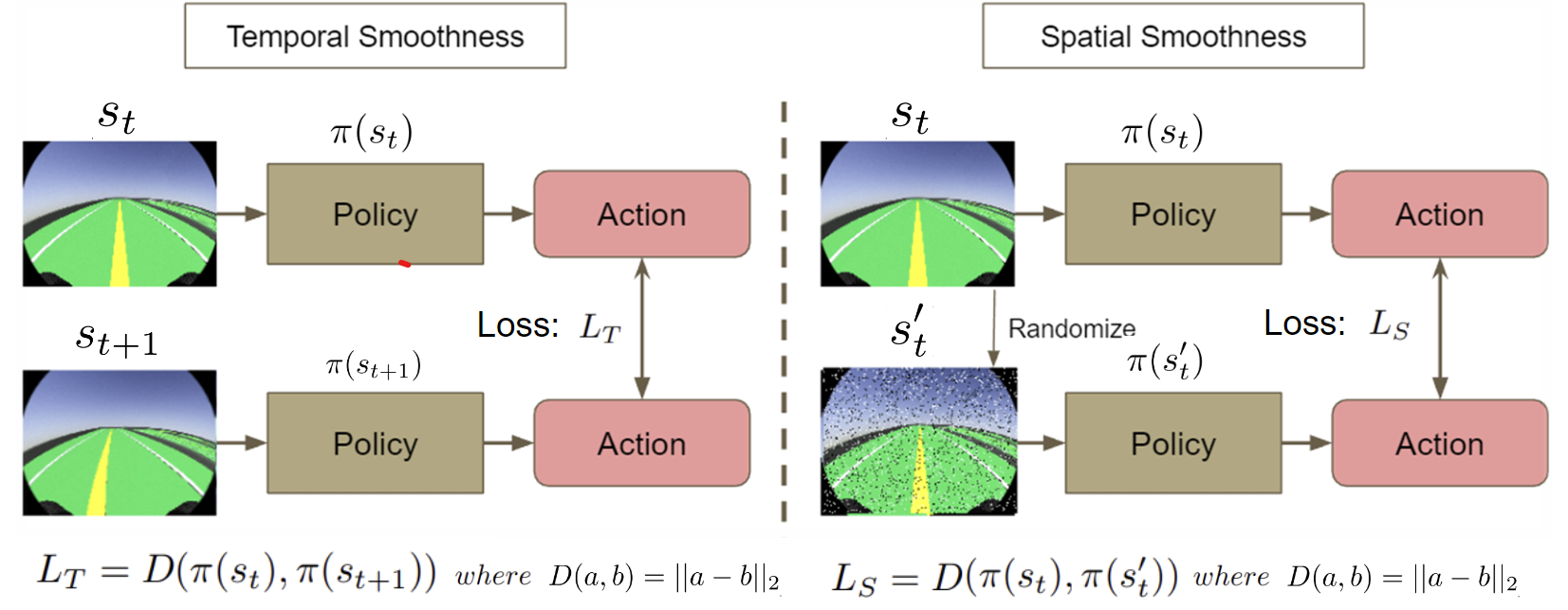
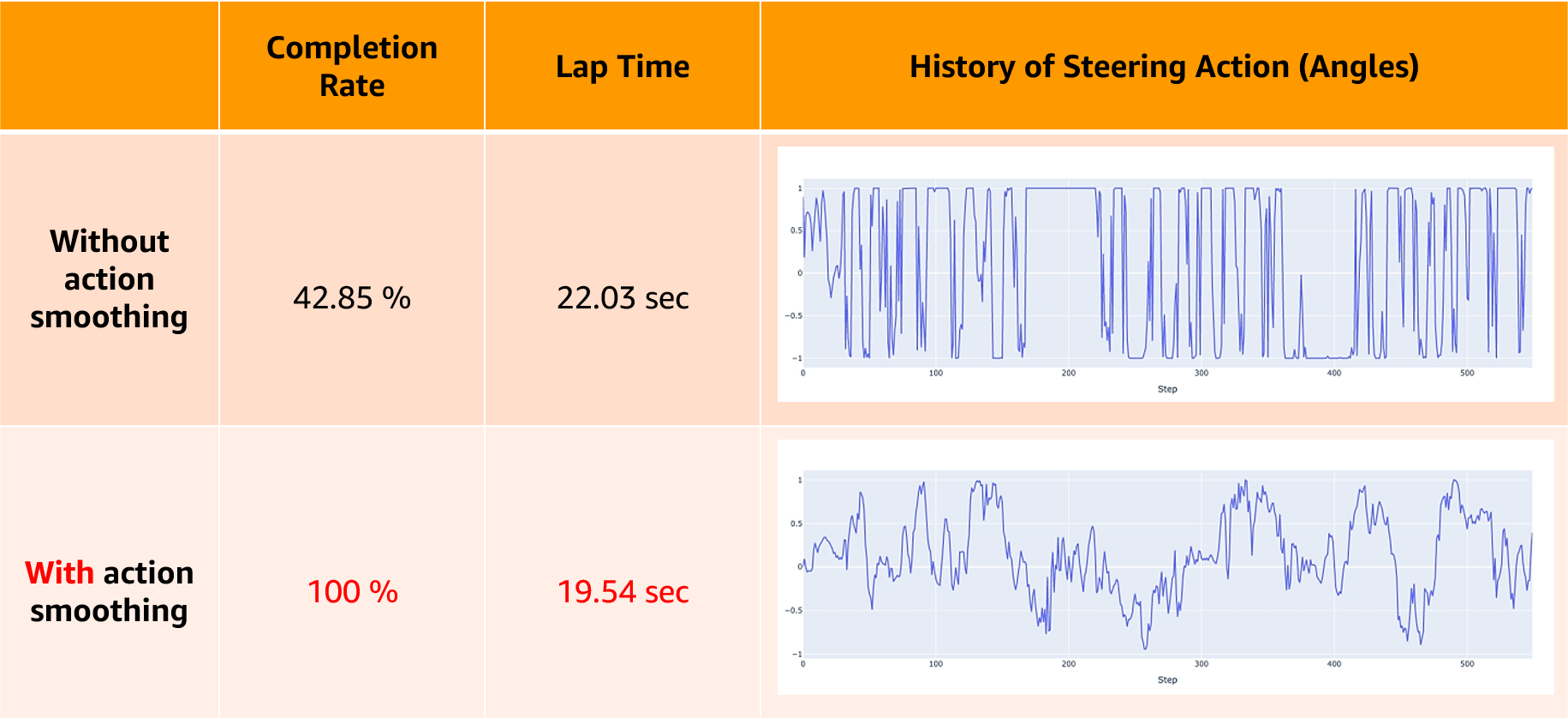
| Summary | We propose a sim-to-real transfer technique utilizing a generative adversarial model CycleGAN for virtual-to-real image style transformation, reducing the gap between pure visual self-driving model performance in simulationreality. Then, we propose a method for action smoothness by enhancing the continuity in consecutive actions. The combination of these methods successfully improves the speedstability of the physical race car. |
||
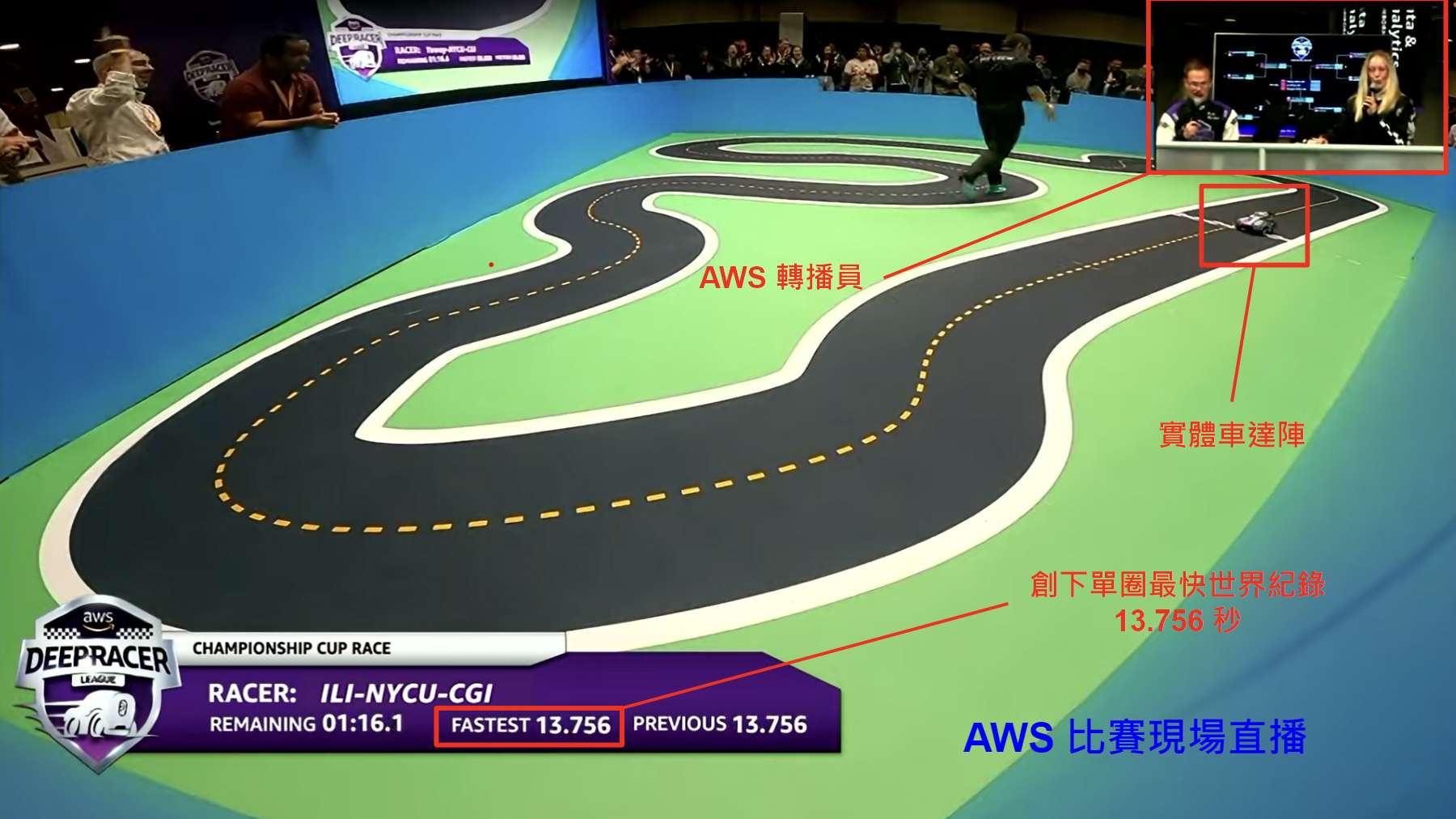
| Scientific Breakthrough | We propose a sim-to-real transfer techniquean action smoothing method which greatly enhances the driving performance of DRL-based self-driving car racing by addressing challenges related to virtual-to-real environment differencescontrol stability.This technology was presented at workshops of two toptier conferences, ICRAIJCAI, in 2022,also achieved a remarkable accomplishment by winning the top three in the AWS DeepRacer League competition (with 150,000+ contestants). |
||
| Industrial Applicability | We propose a sim-to-real transfer techniquean action smoothing method that enhances the feasibility of DRL in real-world applications, opening up possibilities for robotics, robotic arms,unmanned drone control in real-world settings. Furthermore, this technology finds applications beyond self-driving car competitions, including unmanned transport vehicles in factoriesemergency exploration in challenging environments. It offers cost-effectivefast deployment capabilities. |
||
| Keyword | Deep Reinforcement Learning Deep Learning Network Autonomous Car Racing Sim-To-Real Transfer End-to-end learning Soft-Actor-Critic (SAC) Action Policy Smoothness CycleGAN | ||
- Contact
- Cindy Ko
- cindyko@nycu.edu.tw
other people also saw