



| 技術名稱 | 果園雷射除蟲機器人 | ||
|---|---|---|---|
| 計畫單位 | 國立陽明交通大學 | ||
| 計畫主持人 | 陳顯禎 | ||
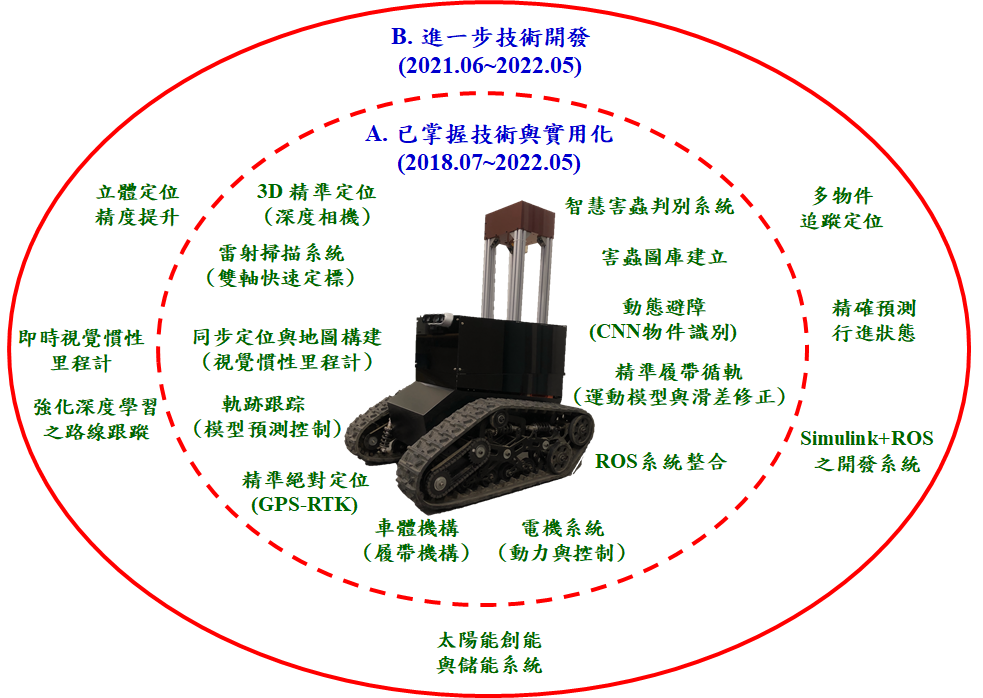
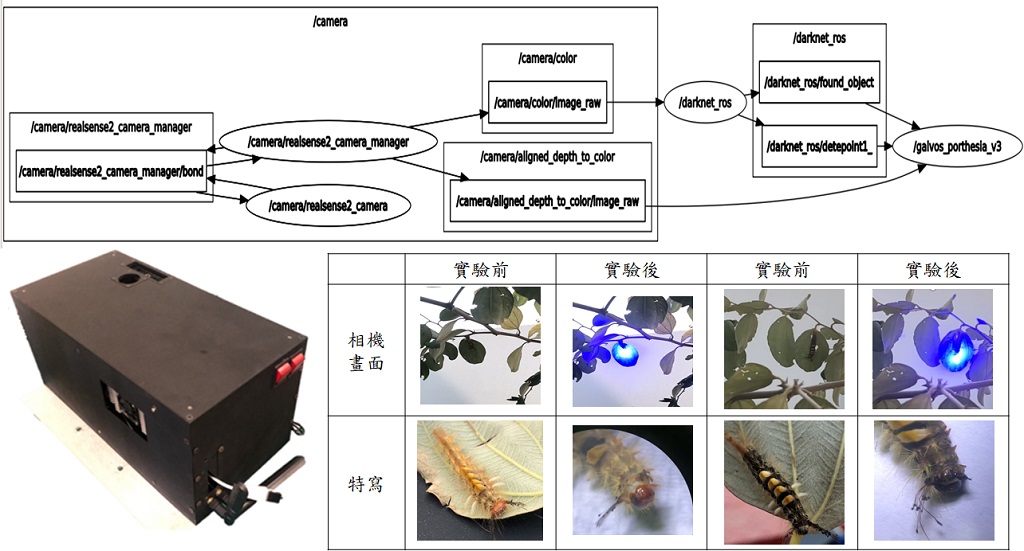
| 技術簡介 | "1.害蟲影像辨識與3D定位系統:系統模組化;_x000D_ 2.高效率雷射除蟲掃描系統:整體誤差±1mm,開發適用於無風及微風環境下;_x000D_ 3.經濟型坡地履帶車提升:自主開發之動力設計與動力學模型之車體控制;_x000D_ 4.田間無人車控制平台:於場域中精準絕對定位,並依據其地圖規劃無 |
||
| 技術影片 |
|
||
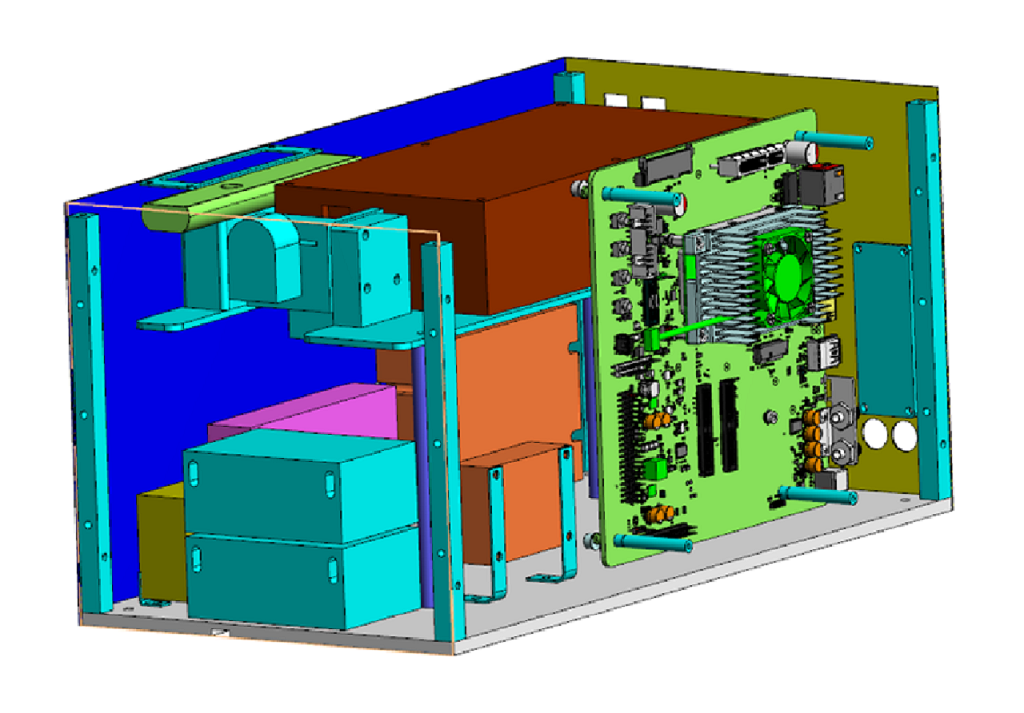
| 科學突破性 | 在農用無人地面載具上裝載3D雷射即時除蟲及智慧影像辨識與定位系統,開發可24小時工作的果園人工智慧雷射除蟲系統,以奠定未來非化學/物理性防治技術的基石。無人載具以履帶車的農機設計克服台灣果園多位於山坡地地型,強化系統構造及打造專屬車架,適用於地形高低落差較大以及田間環境複雜之場域。 |
||
| 產業應用性 | 本技術「果園雷射除蟲機器人」將「具精準3D定位之果園人工智慧雷射除蟲系統」運用在農業蟲害防治,可24小時不間斷地在果園辨識和去除害蟲,具產業實用性。所開發出的關鍵技術可技轉至農機廠商或與其他異業合作,藉由導入智慧光電與地面無人載具技術,將農業提升為電動化、智慧化、無人化,達成農業與智慧科技雙贏目標。 |
||
| 媒合需求 | 天使投資人、策略合作夥伴 |
||
| 關鍵字 | 智慧農用機器人 智慧影像辨識 無人地面載具 雷射蟲害防治 棗園 小物件偵測 同步定位與地圖構建 軌跡跟蹤 | ||
- 聯絡人
- 翁翠霞
- 電子信箱
- thweng@nctu.edu.tw







