:::
- 首頁
- /
- 年度
- /
- 2021
- /
- 精準健康(醫材&防疫科技)
- /
- 人工智慧機器人應用於植物醫學之研究-以甜椒為例






| 技術名稱 | 人工智慧機器人應用於植物醫學之研究-以甜椒為例 | ||
|---|---|---|---|
| 計畫單位 | 國立嘉義大學 | ||
| 計畫主持人 | 艾群 | ||
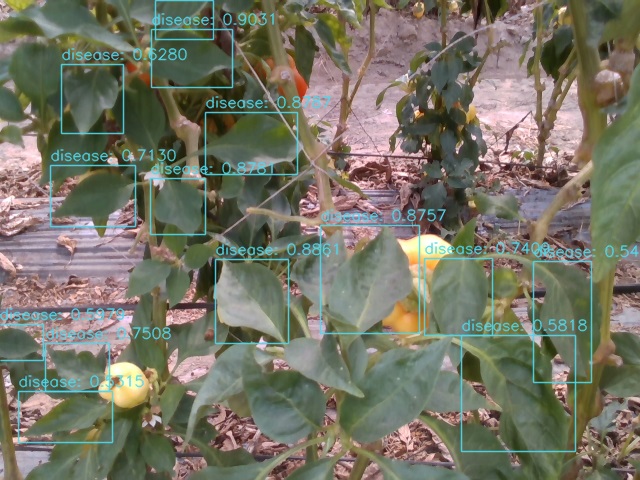
| 技術簡介 | 甜椒栽培管理智慧植保機器人含病蟲害影像辨識定位系統、噴藥系統、自動行走系統三部分。定位系統以YOLO4深度學習模型及影像3D視覺整合,執行病徵檢測及空間定位,再引導含噴藥裝置機械手臂對病徵精準噴藥。自動行走系統以GPS定位規劃植保機器人田間移動,於設施內自動搜尋感染病蟲害的植株,執行病蟲害防治任務。 |
||
| 科學突破性 | 本技術於影像與立體視覺對甜椒病蟲害影像辨識資料庫,包含害物主要危害狀影像資料外,更建立害物危害狀早期至晚期資料,可於未來對相似作物的病蟲害進行擴充,不只侷限甜椒病蟲害,在施藥過程,機器視覺加上機器人精準施藥,可增加效率與避免用藥過度狀態,人工智慧機器人於設施生產甜椒管理,是在田間或設施栽培最佳選擇。 |
||
| 產業應用性 | 開發一套能精準辨識病蟲害病徵的履帶式自走植保機器人,基於多核心甜椒病蟲害影像辨識,採用深度學習Faster R-CNN、YOLOv4進行植株病理辨識,建立影像資料庫,除包含甜椒危害狀影像資料,更建立甜椒危害狀早期至晚期資料,此資料庫除可應用於本技術開發,亦可應用一般作物害物辨識,協助植物醫學診斷。 |
||
| 媒合需求 | 天使投資人、策略合作夥伴 |
||
| 關鍵字 | 植保機器人 影像辨識 人工智慧 深度學習 甜椒 病蟲害控制 履帶式無人自走車 GPS路徑規劃 | ||
- 聯絡人
- 黃侲儒
- 電子信箱
- wlo2685583@gmail.com
其他人也看了