



| Technical Name | 果園雷射除蟲機器人 | ||
|---|---|---|---|
| Project Operator | National Yang Ming Chiao Tung University | ||
| Project Host | 陳顯禎 | ||
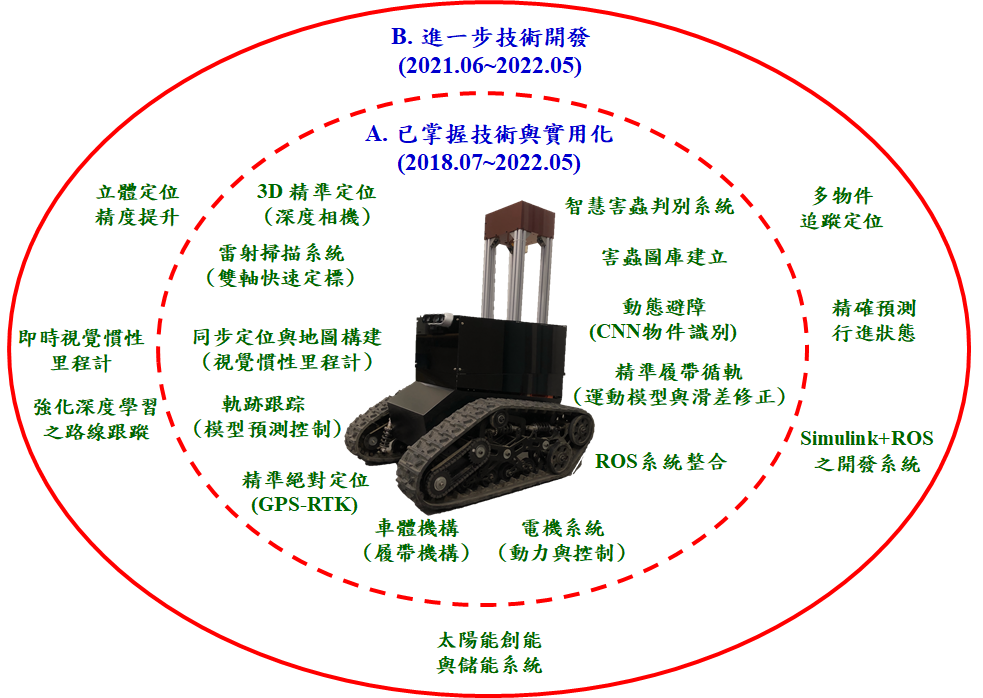
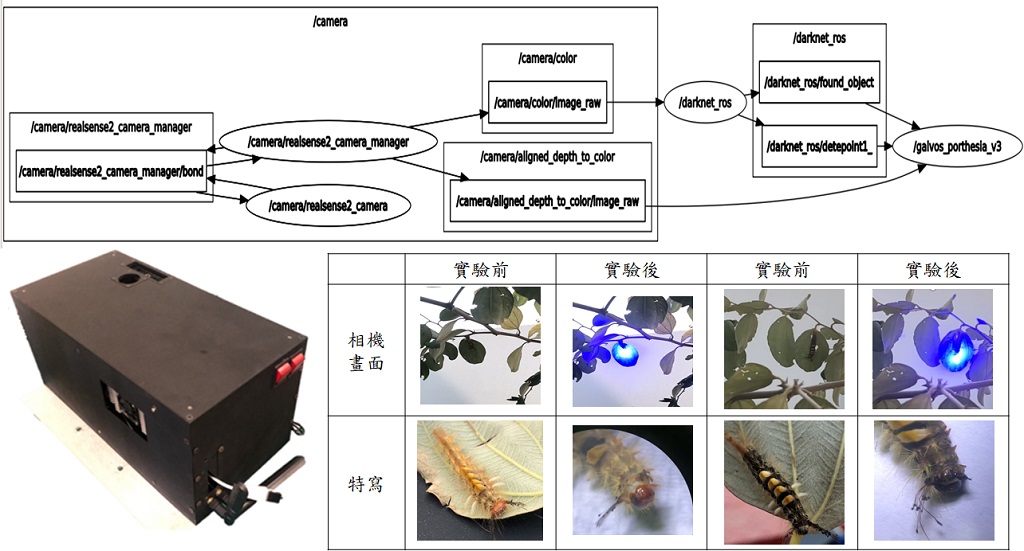
| Summary | (1) Image recognition3D positioning of the pest: Modularize the system for testing on the orchard. (2) High efficiency laser pest control scanning system: It was developed to be suitable for windlessbreezy environments. (3) Enhance the economic tracked vehicle for hillside field: Self-developed power designsteering control based on dynamic model,(4) Field UGV control platform: Based on the preciseaccurate positioning in field, when robot operates on the reference path which planned by map, it can do path trackingdynamically obstacle avoiding in real-time. |
||
| Technical Film |
|
||
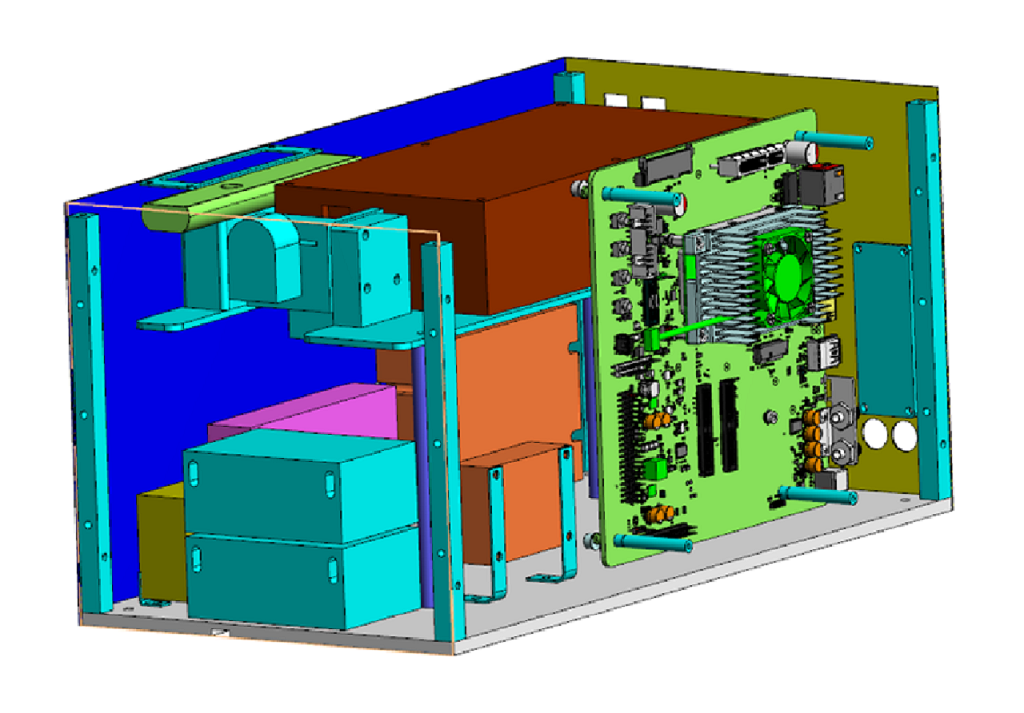
| Scientific Breakthrough | A new method of 3D laser real-time pest control with intelligent image recognitionpositioning systems is developed based on agricultural unmanned ground vehicles for pest control. The designed artificial intelligent laser pest control system, which is able to work 24 hours a day, lays the foundation for the future of physical control technology. The concept of using crawler vehicles for unmanned vehicles is to strengthen the traditional agricultural machinery with systematic structurededicated framework. It is suitable for fields with large terrain heightscomplex environments. |
||
| Industrial Applicability | "Artificial intelligence laser pest control system with precise 3D positioning for orchard" uses smart optoelectronics agriculture robot to identifydisable the pest in the orchard 24 hours a day, which is of great industrial applicability. The developed key technology can be transferred to Taiwanese agricultural machinery manufacturer. Moreover, the technology can collaborate with other agriculture IoT group. By introducing intelligent optoelectronicsunmanned grounded vehicle, the traditional agriculture can be motorized, intellectualizedunmanned to develop smart agriculture robot. |
||
| Matching Needs | 天使投資人、策略合作夥伴 |
||
| Keyword | Intelligent farming robot AI image recognition Unmanned ground vehicle Laser pest control Jujube orchard Small object Detection Simultaneous localization and mapping Trajectory tracking | ||
- thweng@nctu.edu.tw
other people also saw







