




| 技術名稱 | 結合虛擬實境與慣性姿態感測器之防疫機器代理人 | ||
|---|---|---|---|
| 計畫單位 | 國立中央大學 | ||
| 計畫主持人 | 李柏磊 | ||
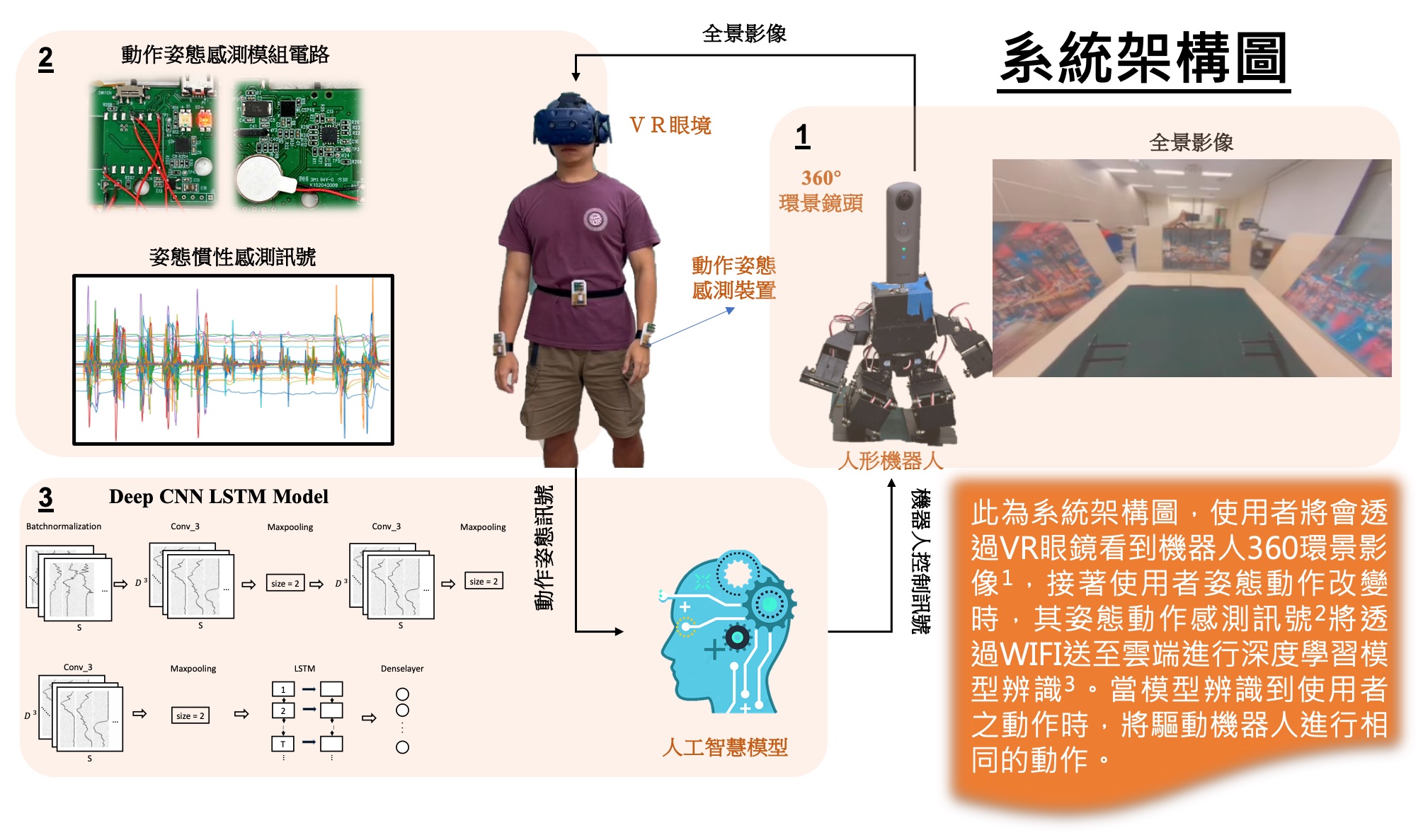
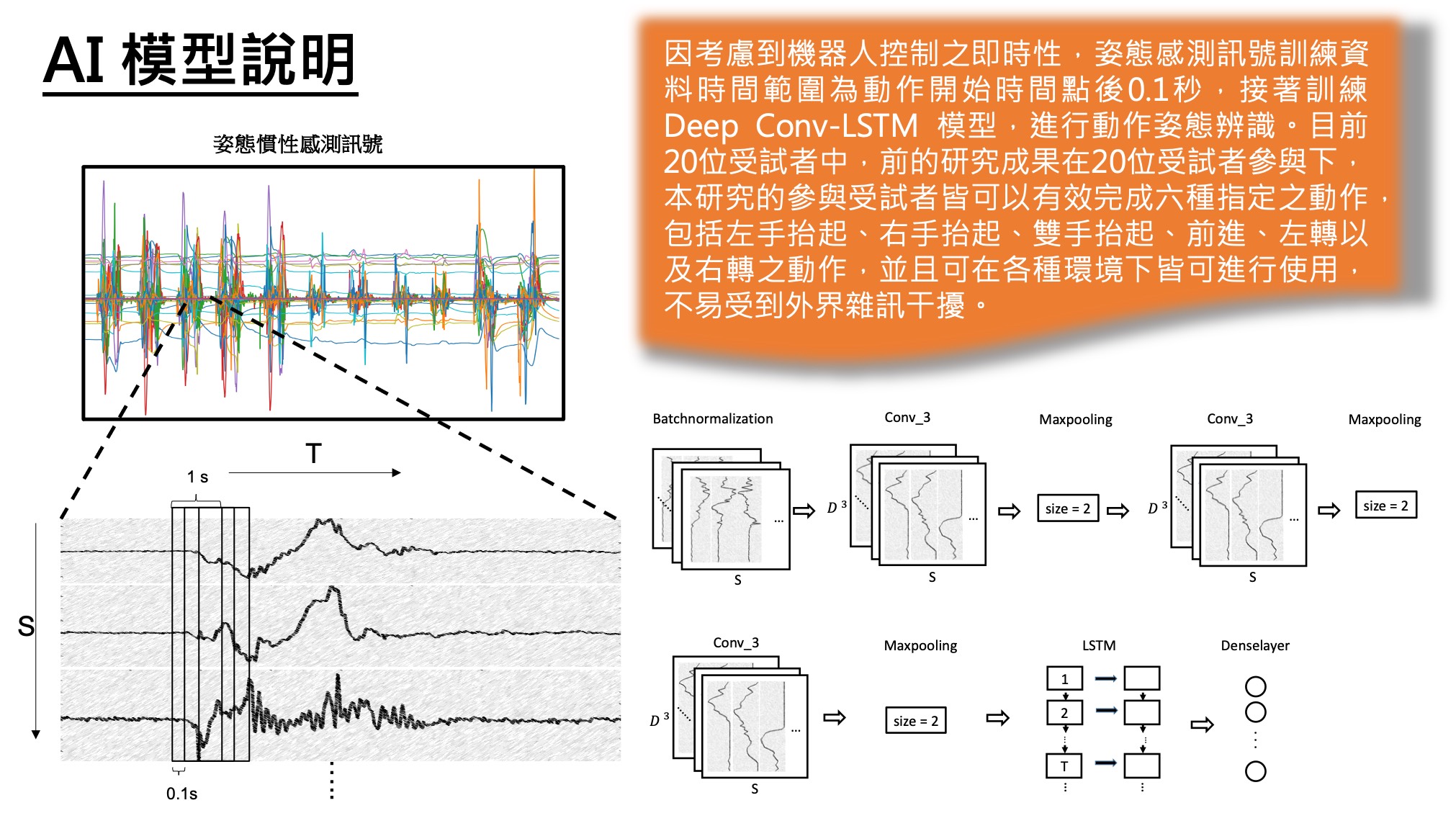
| 技術簡介 | 結合虛擬實境的防疫代理人為具有360度視野的遠端操控機器人,此機器人可藉由讓使用者配帶慣性感測器IMU,辨識不同的動作姿態,讓機器人隨著使用者的動作進行操作,機器人360度場景即時傳回到使用者的虛擬實景頭盔上,讓使用者可以觀看機器人目前身處的場域,進而操作機器人進行左轉、右轉、前進、抬手等動作控制。 |
||
| 科學突破性 | 人形機器人控制技術已有多年的發展歷史,過去的機器人控制技術,大多以光學影像式的為主。然而光學影像技術容易受限於場地因素,例如背景光雜訊、溫度影響、強反射體干擾、遮蔽物等等因素。我們開發不受空間與光學限制的遠端控制防疫代理人,藉由慣性感測器判斷姿態與虛擬實境控制,讓使用者身歷其境完成遠端的工作。 |
||
| 產業應用性 | 隨著新冠肺炎的漫延,世界各國都加緊為接下來的數位時代進行佈局,這個趨勢可以從2021年美國消費性電子展(CES)的展出看到,機器人躍升為產業重要發展方向。其可應用之產業分別為民生防疫應用、陪伴機器人應用與遠端學習應用。 |
||
| 媒合需求 | 天使投資人、策略合作夥伴 |
||
| 關鍵字 | 新冠肺炎 遠端控制機器代理人 防疫 慣性姿態感測 虛擬實境 長短時記憶模型 陪伴機器人 人機協作 姿態控制 全景鏡頭 | ||
- 聯絡人
- 許顥騰
- 電子信箱
- fifaworld91@g.ncu.edu.tw







