




| Technical Name | 結合虛擬實境與慣性姿態感測器之防疫機器代理人 | ||
|---|---|---|---|
| Project Operator | National Central University Department of Electrical Engineering | ||
| Project Host | 李柏磊 | ||
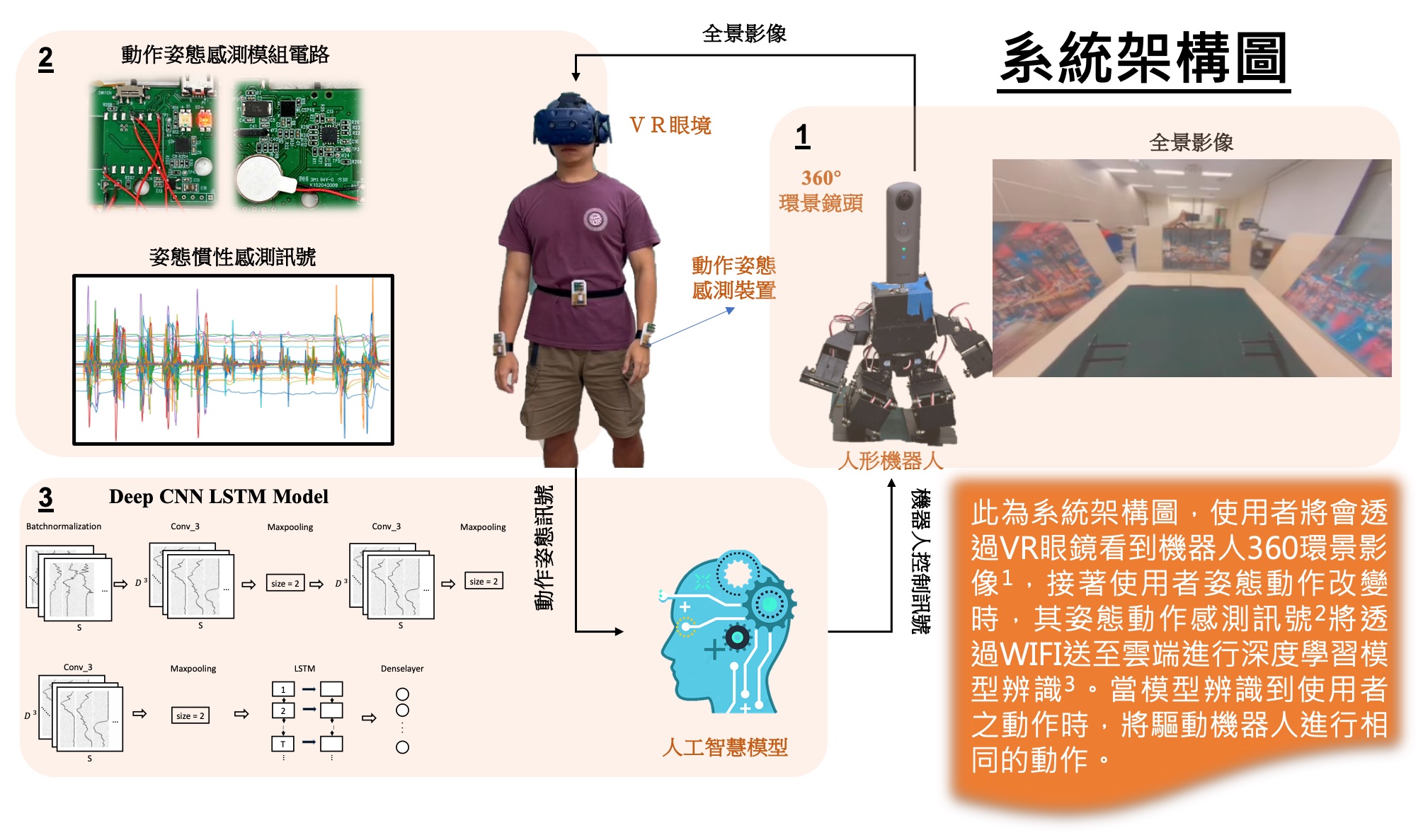
| Summary | We have designed a remotely-controlled robot which equipped with a 360 degree full HD camera. User’s postures are detected by measuring the accelerationrotation of changes of limb postures using inertial measurement units (IMU). User’s motion commands are wirelessly transmitted to actuate the remote robot in accordance with user’s posture. The 360 degree full scene camera keeps transmitting the real-time situation of the scene surrounding the robot back to the user, displayed on the VR headset. |
||
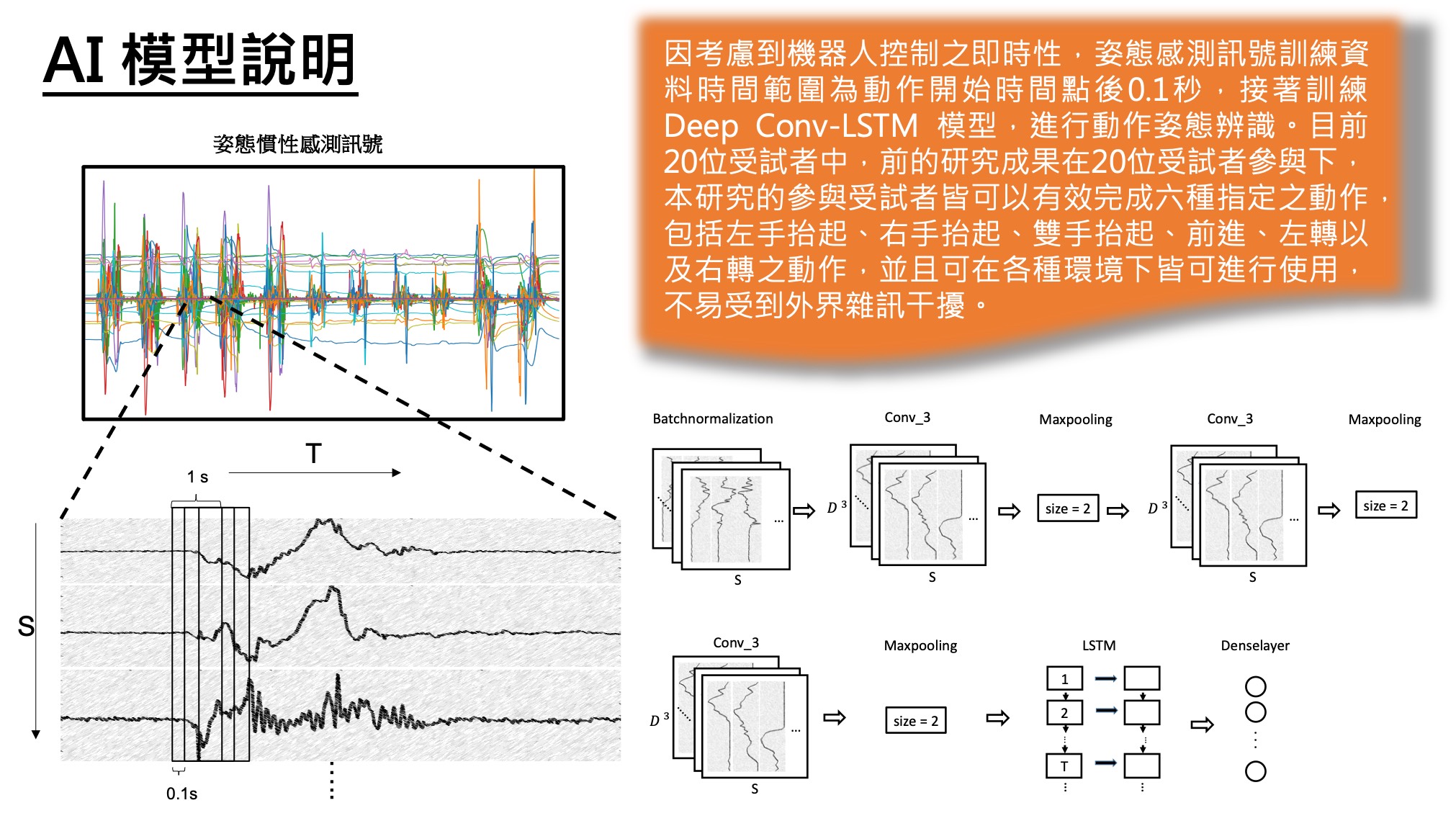
| Scientific Breakthrough | Our lab has developed a IMU-based posture detection system for biped robot control. The IMU data generated from different posture motions are acquireduser’s postures are then recognized by deep learning network instantly. In contrast to other studies which requires the IMU data of full motion for posture detection, we calculate subject’s posture changes in every 0.1 second so that the robot can move following subject’s posture changes instantly. The IMU data are wirelessly transmitted to LSTM deep learning networks. Our current system can achieve detection accuracy higher than 95. |
||
| Industrial Applicability | According to the market report of IEK, the market size of global service robot is US$17.8 billionskeeps increasing now. Our system combines the VRIMU-based posture control to operate the robot. The VR provides the scene for users to immerse in the environment surrounding the robotthe IMU provides direct control of the robot. The system not only provides a directconvenient way for people to operate a remote robot, but also a way for people to interact with each other under the pandemic of diseases. |
||
| Matching Needs | 天使投資人、策略合作夥伴 |
||
| Keyword | Covid-19 Remote-Control Robot Agent Epidemic Prevention Inertial Measurement Units Virtual Reality Long Short-Term Memory Model Company Robot Human-Robot Collaboration Posture Control Full-View Camera | ||
- fifaworld91@g.ncu.edu.tw
other people also saw







