




| 技術名稱 | 六軸力量力矩感測器關鍵技術突破與實現 | ||
|---|---|---|---|
| 計畫單位 | 國立中山大學 | ||
| 計畫主持人 | 王郁仁 | ||
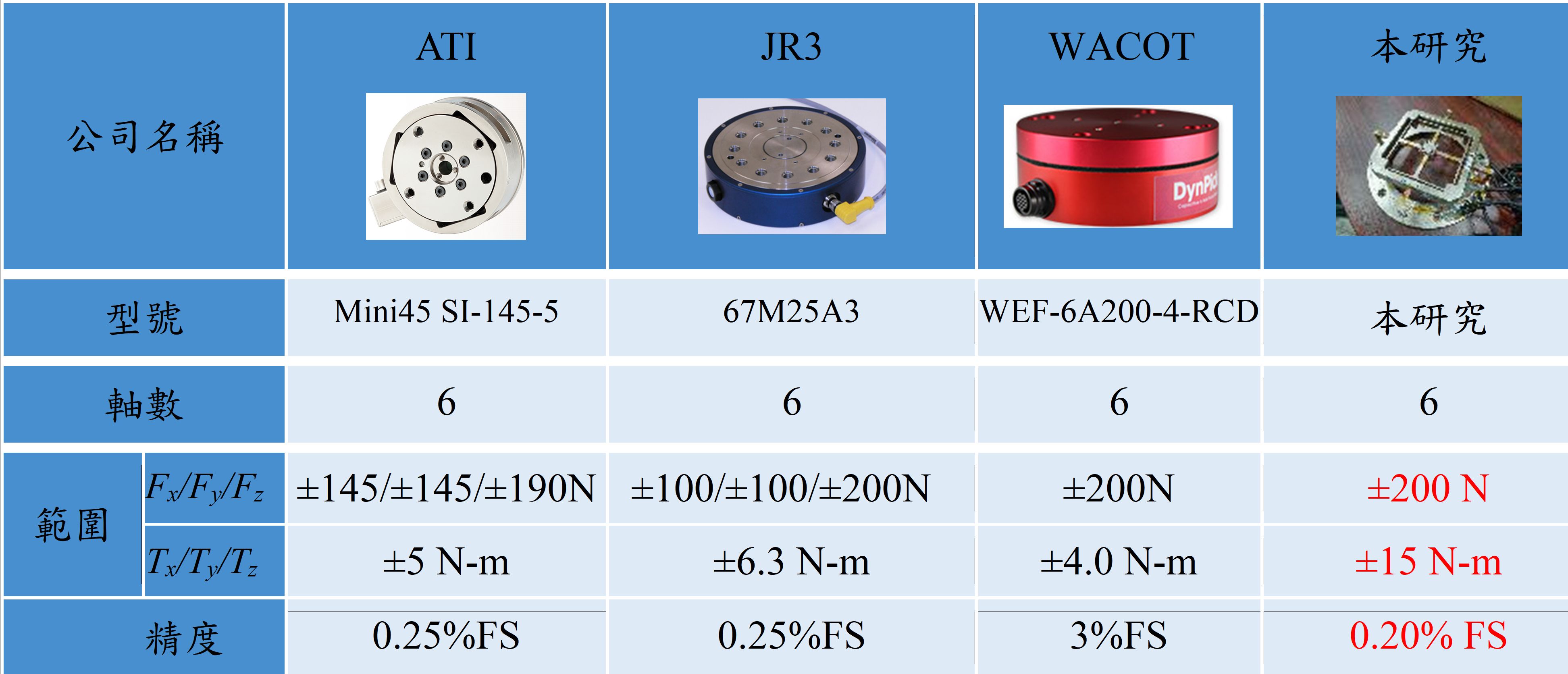
| 技術簡介 | 多軸力量力矩感測器是精密機械、機械手臂不可或缺的感測器,開發多軸力量感測器對於我國產官學界是刻不容緩的研究重點。本研究建立六軸力量感測器設計、校正機器與校正演算法技術,達到領先國外業者的六軸感測精度,誤差小於0.20%(提升1.25倍),三軸力量量測範圍± 200 N,力矩量測範圍±15 N-m。 |
||
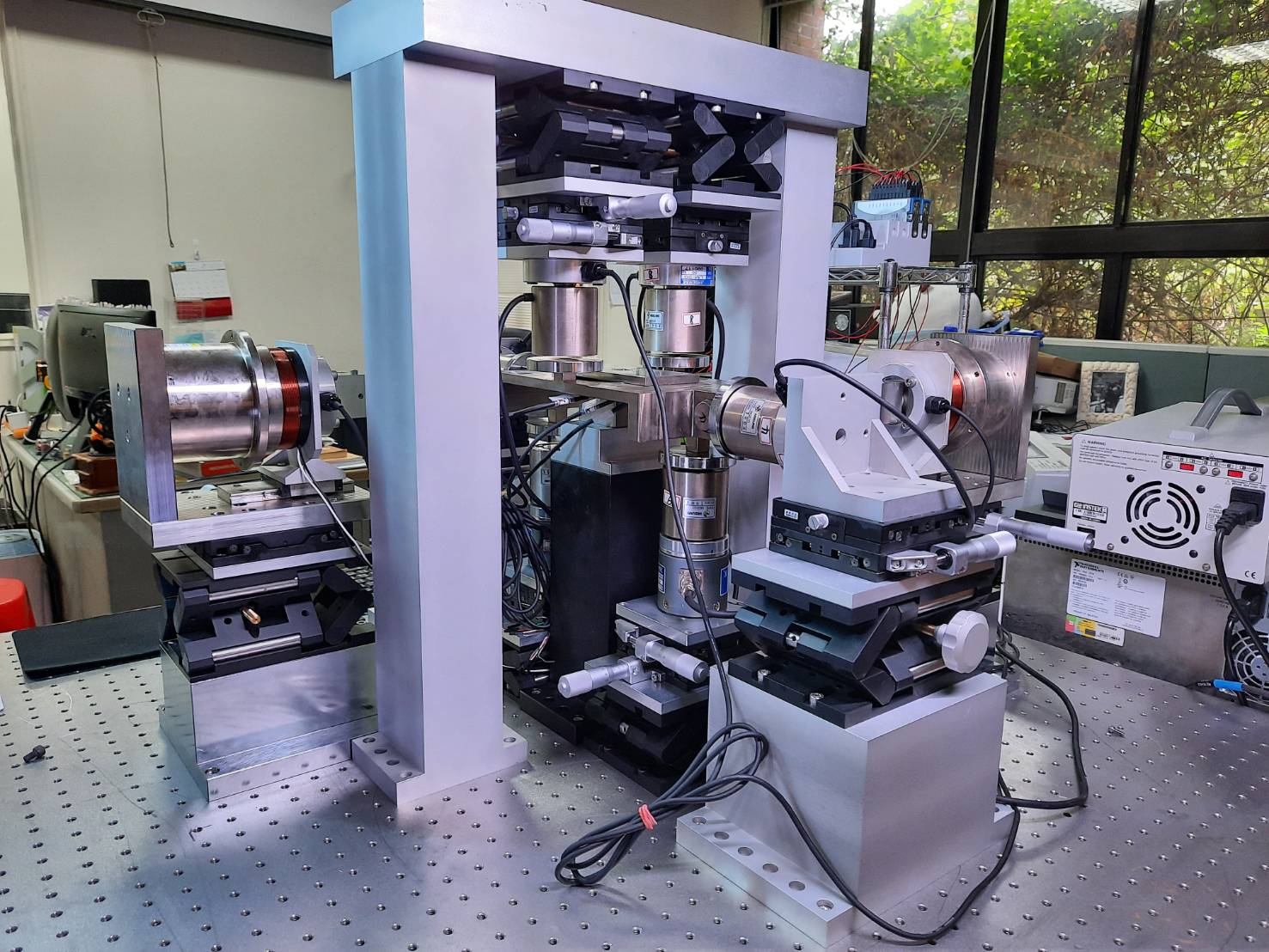
| 科學突破性 | 四大創新。1.雙環力量力矩感測器負載與應變解析解:設計參數化,找出最佳結構。2.平面式六軸力量力矩感測器:實現平面貼附應變計。3.六軸力量力矩感測器校正平台:自動產生標準力量與力矩,實現大數據校正。4.線性到類神經網路校正演算法,結合倒傳遞類神經網路與以上作法,達成領先業界精度1.25倍。 |
||
| 產業應用性 | 串聯上中下游,打造台灣的多軸力量感測器產業鏈,從上游感測器出貨到下游多元應用,對我國產業有廣泛的影響,已經有四家業者與法人單位多年合作,具應用實績。總技轉金額為新台幣56.2萬元,累積業界合作金額為326萬元。專利獲得兩案。目前已達試量產階段,並整合於兩款機械手臂完成實測。 |
||
| 媒合需求 | - |
||
| 關鍵字 | 多軸力量力矩感測器 力量校正 最小平方法 深度學習 類神經網路 應變規 精密機械 機械手臂 力量校正設備 精度 | ||
- 聯絡人
- 羅宇然
- 電子信箱
- lo_yu_jan@g-mail.nsysu.edu.tw
其他人也看了