



| 技術名稱 | 多軸力量感測器與校正技術 | ||
|---|---|---|---|
| 計畫單位 | 國立中山大學 | ||
| 計畫主持人 | 王郁仁 | ||
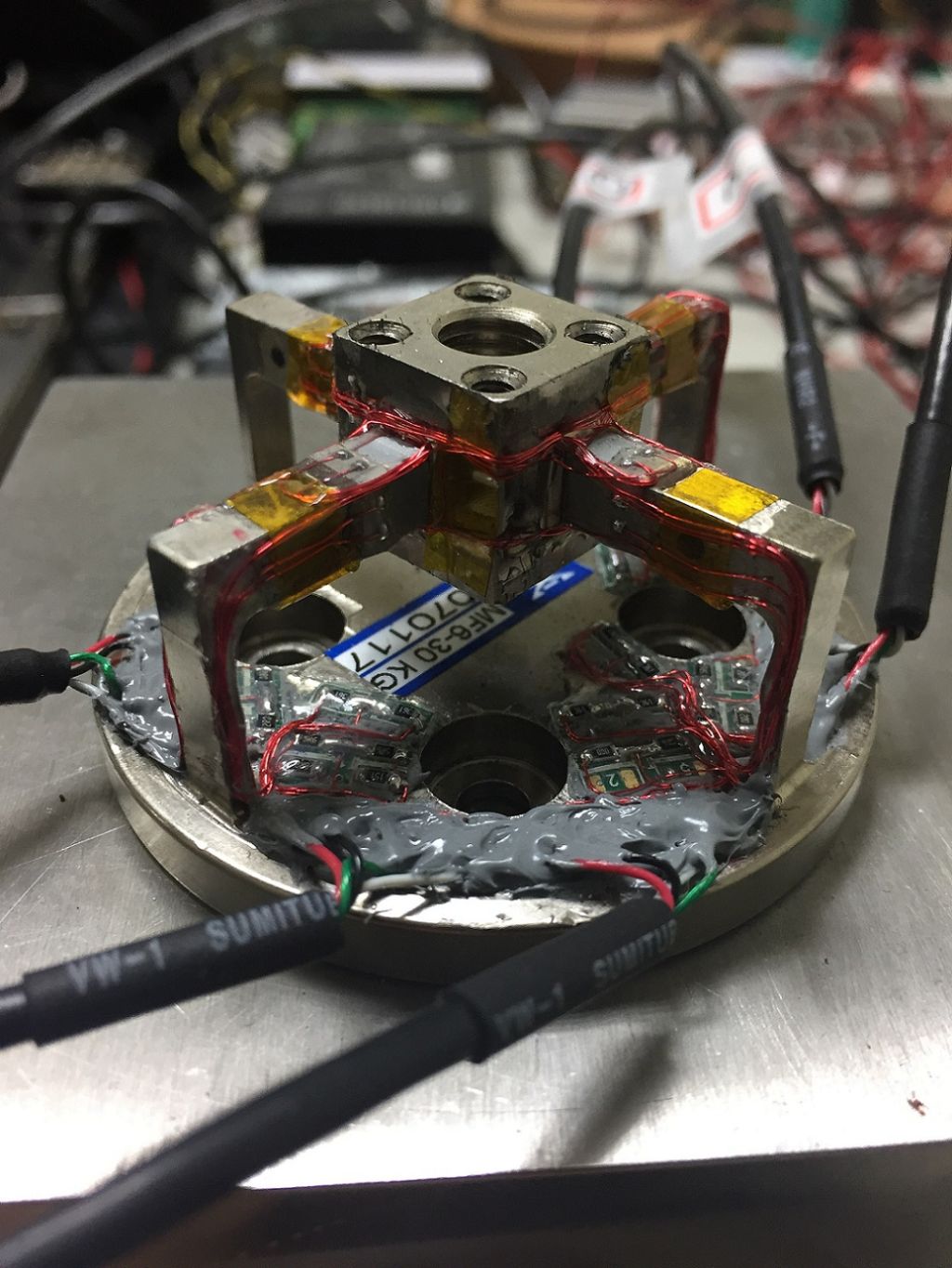
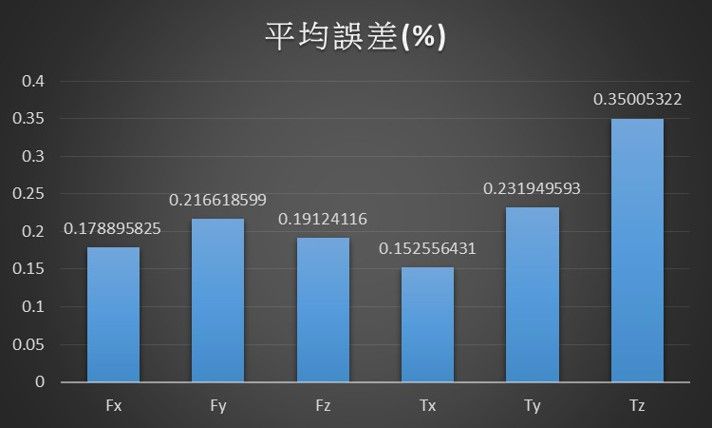
| 技術簡介 | 本技術為多軸力量感測器與校正技術,建立力量對於輸出電壓的轉移函數。並開發關鍵校正技術,校正平台產生精確的力量直接傳遞至感測器結構。採用最小平方法與類神經網路,建立多軸感測器輸入電壓與輸出力量的關係。六軸力量力矩感測器感測範圍:±300 N;±20 N-m 精度:0.25 %FS |
||
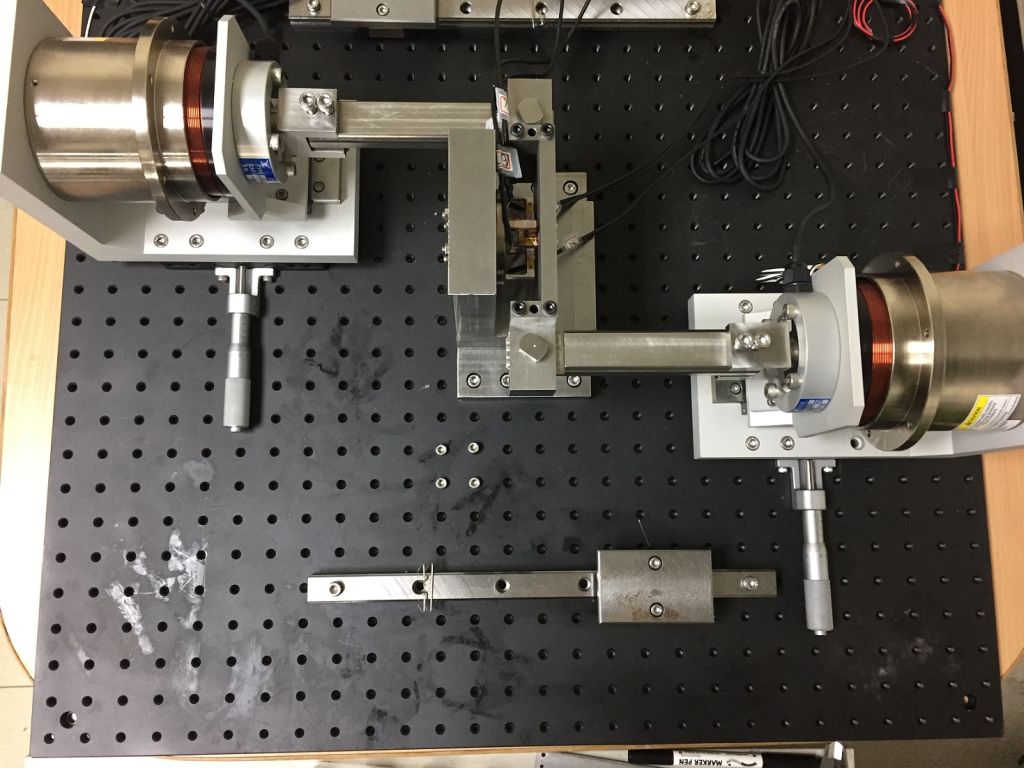
| 科學突破性 | 六軸力量感測器設計為利用雙環結構和蟹型腳結構,造成不同軸向力對於六軸力量/力矩感測器產生特定之變形,配合應變規黏貼與惠斯通電橋的應用降低耦合及提高感測器之精度。校正平台為可同時提供多軸向力的機構,確保給予穩定且可信之校正力,蒐集力量感測器所產生之應變訊號。透過校正方法找出其轉換關係,完成校正之流程。 |
||
| 產業應用性 | 機械手臂的使用成為許多國家於生產線回歸原產國趨勢下的主要選擇,其中需精密力量控制之工作如拋光、打磨、焊接、組裝精密元件等,工業機械手臂尚無法直接完成,須依賴裝置多軸力量感測器偵測微力改變,回饋加工信號至機械手臂,以處理微小精密力量控制的工作。本團隊研發之力量感測器技術已開始與多家業界廠商洽談合作。 |
||
| 關鍵字 | 多軸力量感測 力量校正 最小平方法 深度學習 類神經網路 應變規 智慧機械 機械手臂 力量校正設備 工業4.0 | ||
- 聯絡人
- 吳莉棋
- 電子信箱
- sh970726@gmail.com
其他人也看了