



| 技術名稱 | 用於智慧生活的靜態與動態視覺關鍵技術 | ||
|---|---|---|---|
| 計畫單位 | 國立清華大學 | ||
| 計畫主持人 | 鄭桂忠教授 | ||
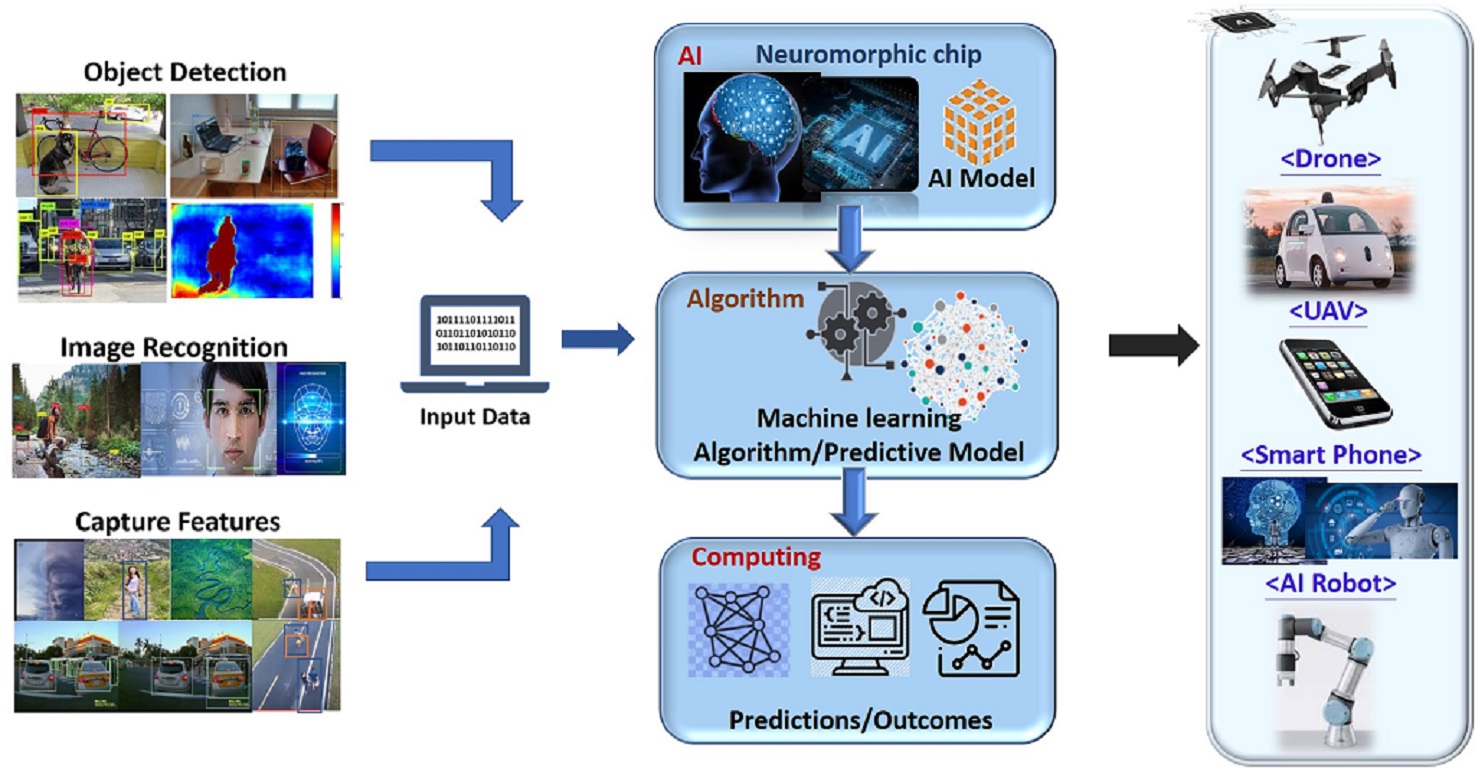
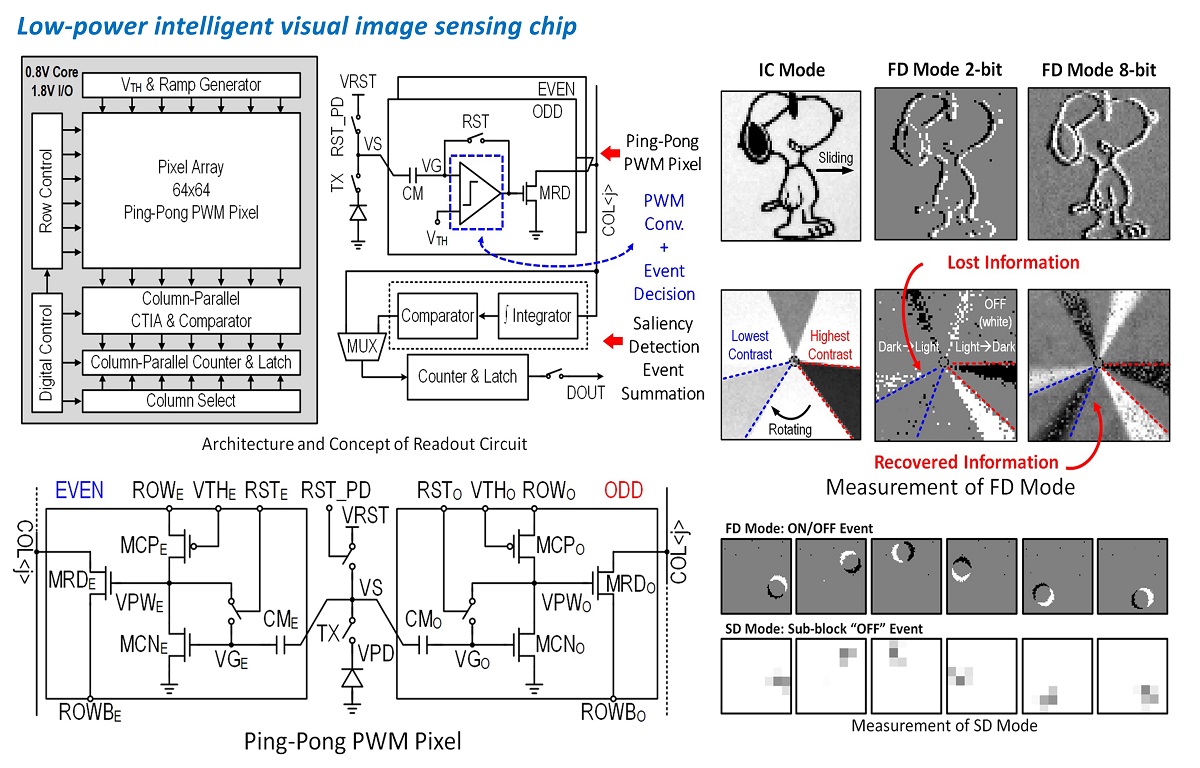
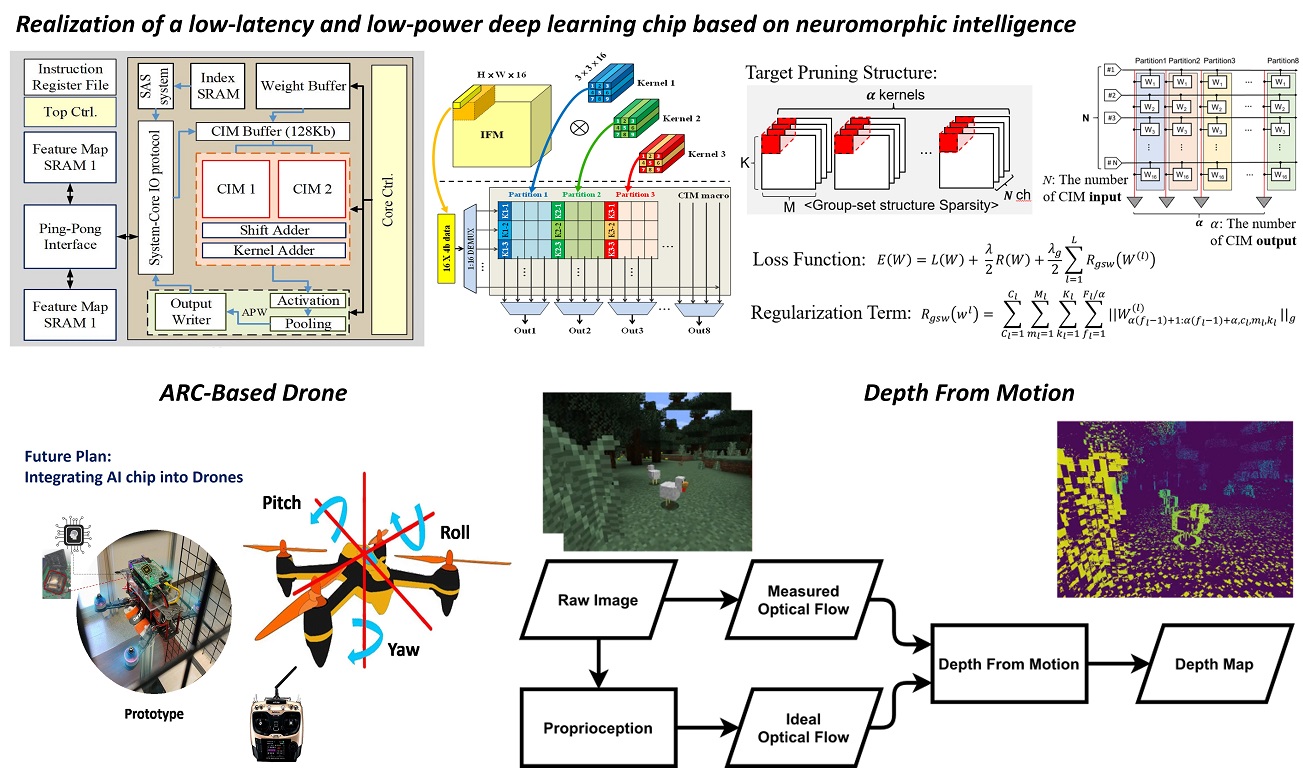
| 技術簡介 | "(1)動態視覺感測器可達到待機狀態低功耗且可分辨出移動中之物體並輸出其邊緣資料 (2)基於記憶體內運算實現仿神經架構以加速神經網路,降低系統延遲並提高能源效率 (3)以視覺為基礎結合本體感知之仿神經障礙物偵測演算法,具有快速低功耗之特性 (4)次世代記憶體內運算AI晶片、次世代無人機關鍵主晶片軟硬 |
||
| 科學突破性 | 自主開發無人機關鍵主晶片結合所開發、目前國際上無人機晶片都沒有的記憶體內運算、感測器內運算、仿果蠅大腦神經網路等先進技術。單晶片影像感測器實現影像擷取、幀差影像、事件偵測,高速且低功耗物體追蹤及移動物體偵測,稀疏化模型壓縮演算法節省推論時間和總能耗,整合光流、SNN、自體感知使UAV於複雜環境中避障 |
||
| 產業應用性 | 動態視覺感測器的低功耗及偵測追蹤移動物體特性,搭配立體視覺運算可達到高速移動物體之距離偵測,用於安控與UAV避障。靜態記憶體內運算的剪枝結構,以仿神經智慧低延遲低功耗深度學習晶片實現低功耗的智能運算用於IoT裝置。記憶體內運算AI晶片可用於醫療、機器人、智慧家電;多旋翼無人機用於搜救巡檢、農業、運輸 |
||
| 媒合需求 | 天使投資人、策略合作夥伴 |
||
| 關鍵字 | 影像內運算技術 低功耗CMOS影像感測器 動態視覺感測器 CIM-based深度學習晶片 稀疏化(Sparsity)模型壓縮演算法 仿神經晶片 光流障礙物偵測 人工智慧邊緣運算、物件偵測、CNN硬體加速器 記憶體內運算AI晶片 多旋翼無人機主晶片 | ||
- 聯絡人
- 羅至吟
- 電子信箱
- cy_lo@mx.nthu.edu.tw








