





| 技術名稱 | 具智慧知覺與靈活抓取之雙臂擬人機器人 | ||
|---|---|---|---|
| 計畫單位 | 國立清華大學 | ||
| 計畫主持人 | 張禎元 | ||
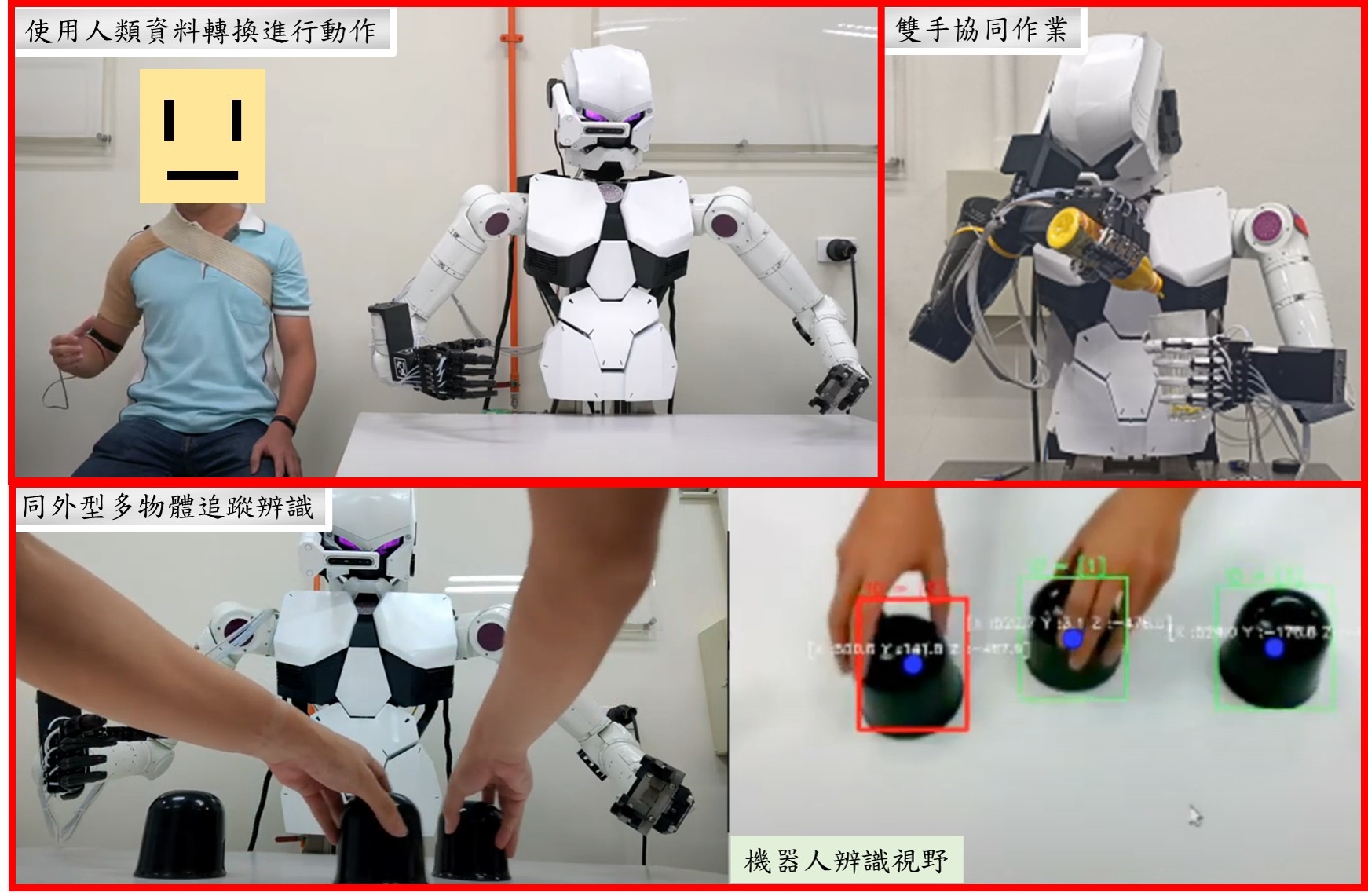
| 技術簡介 | 本團隊研發智慧知覺能靈活抓取之擬人雙臂機器人,藉由視覺、觸覺、運動覺與擬人外觀及關節配置,該機器人能展現人類抓取不同形貌樣物件的靈活度。此機器人之頭部配有深度攝影機,結合AI辨識與即時手眼校正技術,除可精準自動辨識多物體,經視覺回饋搭配頸部2軸複合關節,更可以頭部追蹤物體軌跡,達到精巧物件抓取。 |
||
| 技術影片 |
|
||
| 科學突破性 | 本團隊結合各項技術於單一機器人身上,以完成一具有智慧知覺能靈活抓取之擬人形雙臂機器人。其突破點在於整合擬人雙手臂與AI視覺辨識追蹤以及即時手眼校正技術,並配合擬人手掌及感測器與得以讓機器人可學習人類資料自動辨識、即時追蹤並且精準夾取物體,讓機械人不再只會執行教導好的路徑,賦予其彈性且多工的應對力。 |
||
| 產業應用性 | 此擬人形雙臂半身機器人主要可用於三種方面:1.高危險性2.工廠3.軍事。首先可輔助專業人員等各項高危險性工作,大幅減少人員接觸,避免高傳染性病毒傳播。在工廠或其他工作需求情況下,可利用人身上穿戴式裝置擷取動作資訊,以AI 轉移人類技術進行學習。在軍事方面也可搭配移動式載具輔助士兵各類駐守或偵察任務。 |
||
| 媒合需求 | 天使投資人、策略合作夥伴 |
||
| 關鍵字 | 七軸機械手臂 緊湊型馬達關節模組 即時手眼校正 多物體追蹤視覺 擬人形機器人 隨機物夾取 雙手機器人 相機旋轉模組 | ||
- 聯絡人
- 林昇冠
- 電子信箱
- shengguanlin@gapp.nthu.edu.tw








