



| Technical Name | Demo2Learn – Demonstration-Conditioned Policy for Robotics Few-Shot Imitation | ||
|---|---|---|---|
| Project Operator | National Taiwan University | ||
| Project Host | 徐宏民 | ||
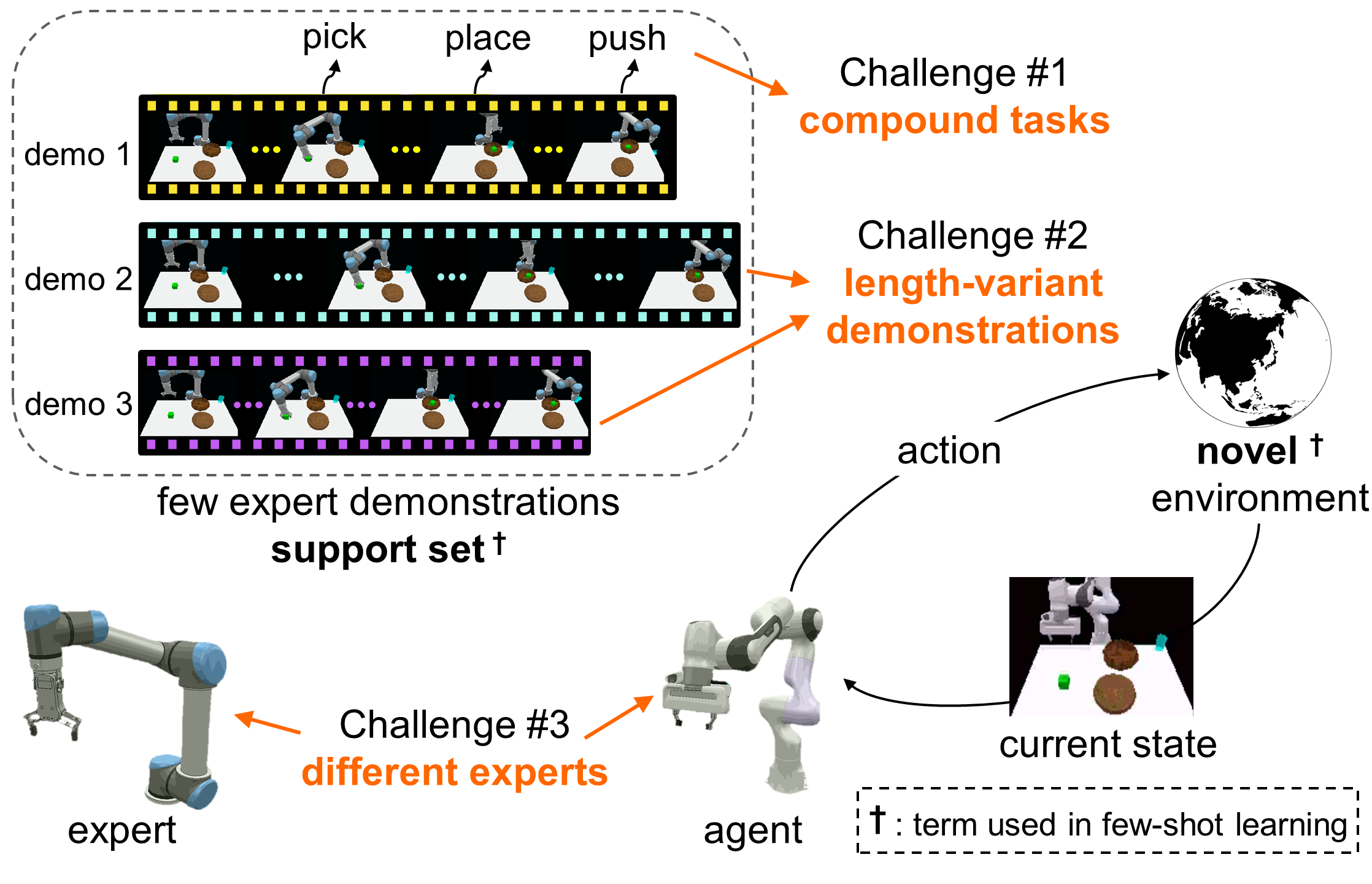
| Summary | "In industrial scenarios, production lines require complex adjustment processesthus limit the flexibilityscalability of learning-based models. Nowadays, a novel strategy that machines directly learn from demos, called imitation learning (IL), has the potential to save considerable time. IL requires lots of demos,a slight action deviation will lead to a harmful status. Thus, previous works perform poorly in real-world applications. Our model (SCAN) can be rapidly adapted to novel tasks using only a few demos by solving three challenges: (1) learning from a distinct expert, (2) multi-stage tasks,(3) misaligned demos. SCAN beats SOTA methods by up to 18 improvement. This work is accepted by the top conferenc |
||
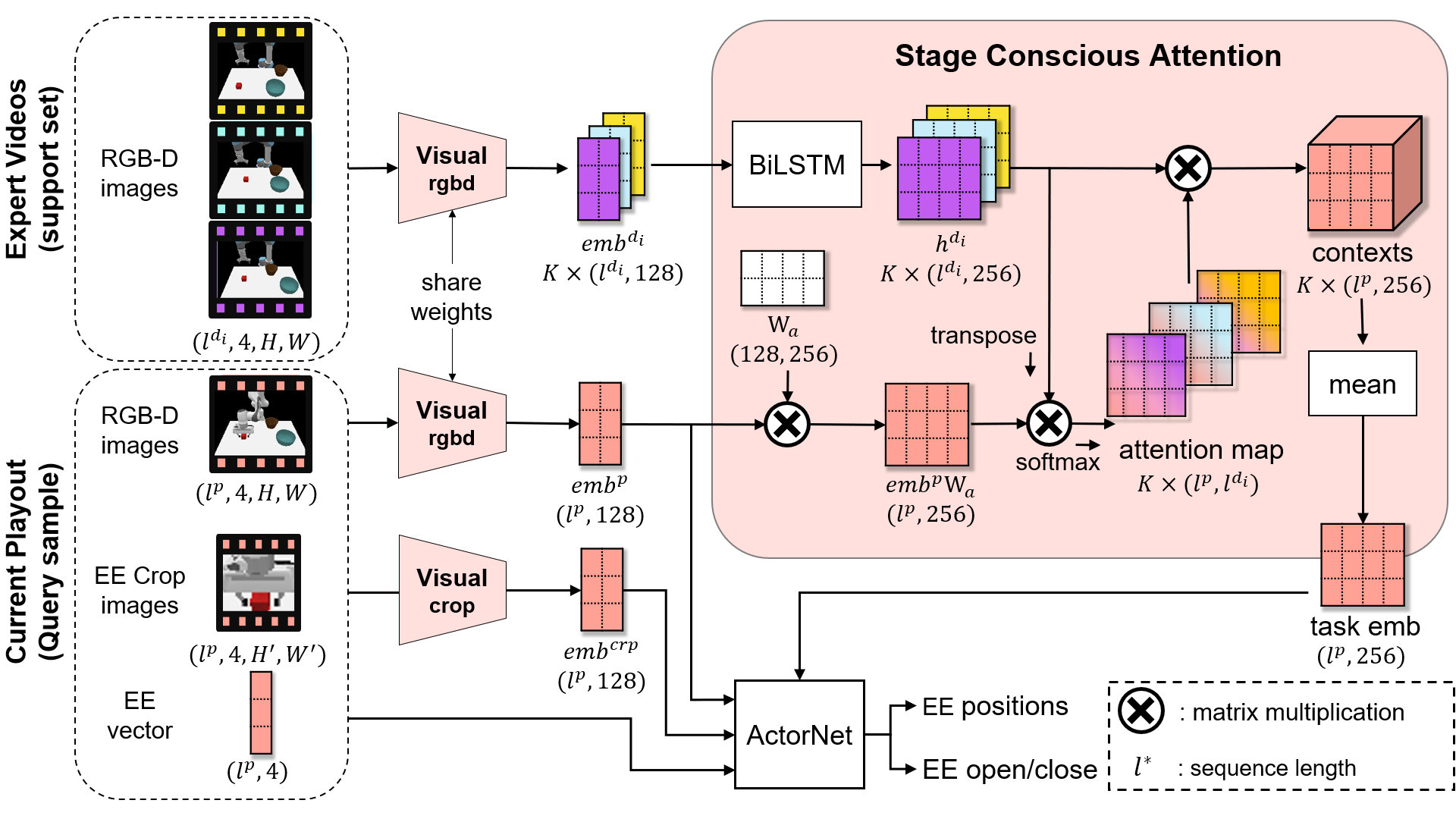
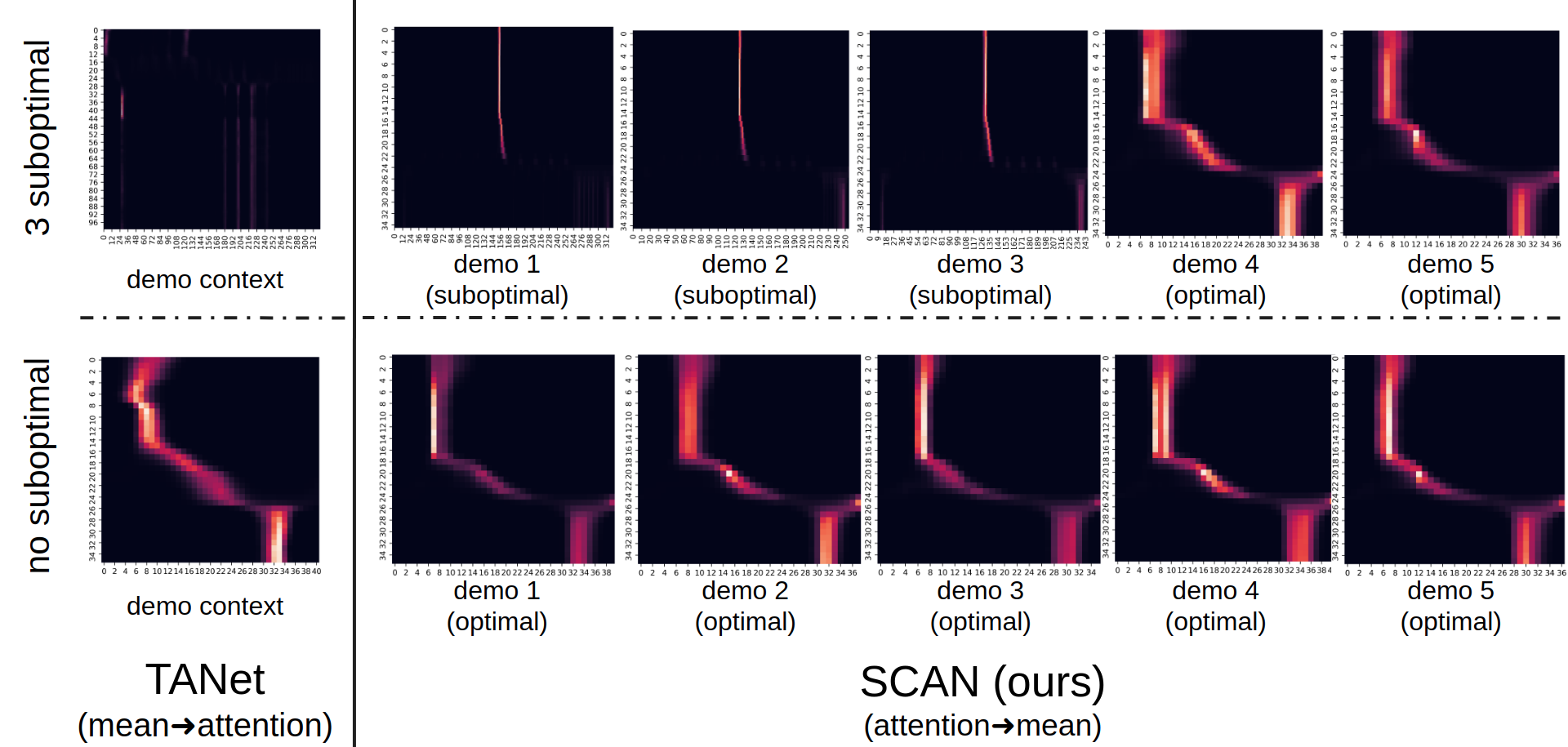
| Scientific Breakthrough | The proposed SCAN can solve the few-shot imitation learning problem with three crucial challenges when applying deep learning techniques to industrial production. SCAN can learn from a different type of expertperform novel multi-stage tasks with a performance improvement of up to 18 against SOTA methods. To retrieve knowledge from misaligned demonstrations, SCAN detects which stage the current observation is infocuses on information at the same stage in the demonstrations. Also, SCAN illustrates its robustness when facing the unseen sub-optimal demonstrations. Visualization results prove the effectiveness of SCAN. This research is accepted by the top conference AAAI with an acceptance rate of 15. |
||
| Industrial Applicability | "To promote the development of Industry 4.0, further integrating deep learning (DL) techniques into industrial scenarios is vital. However, the success of DL models is based on the tremendous amount of annotated data. Collecting sufficient data for each task is unrealistic under real-world scenarios, limiting the feasibilityscalability of DL models in practical applications. The proposed SCAN can be quickly applied to the production lineeasily switched between distinct tasks without time-consumingcostly retraining. Besides, SCAN can extract precise information from few demonstrationsthus perform well in novel tasks. We achieve a critical breakthrough in industrial automation with the novel imitation learning techn |
||
| Keyword | robot arm multi-stage tasks stage conscious attention model recurrent neural network few-shot imitation learning imitation learning deep learning demonstration-conditioned policy domain adaptation | ||
- Contact
- Winston Hsu
- whsu@ntu.edu.tw
other people also saw