



| 技術名稱 | 具衛星圖資對應支援之自主智慧無人機河川巡檢系統 | ||
|---|---|---|---|
| 計畫單位 | 國立政治大學 | ||
| 計畫主持人 | 劉吉軒 | ||
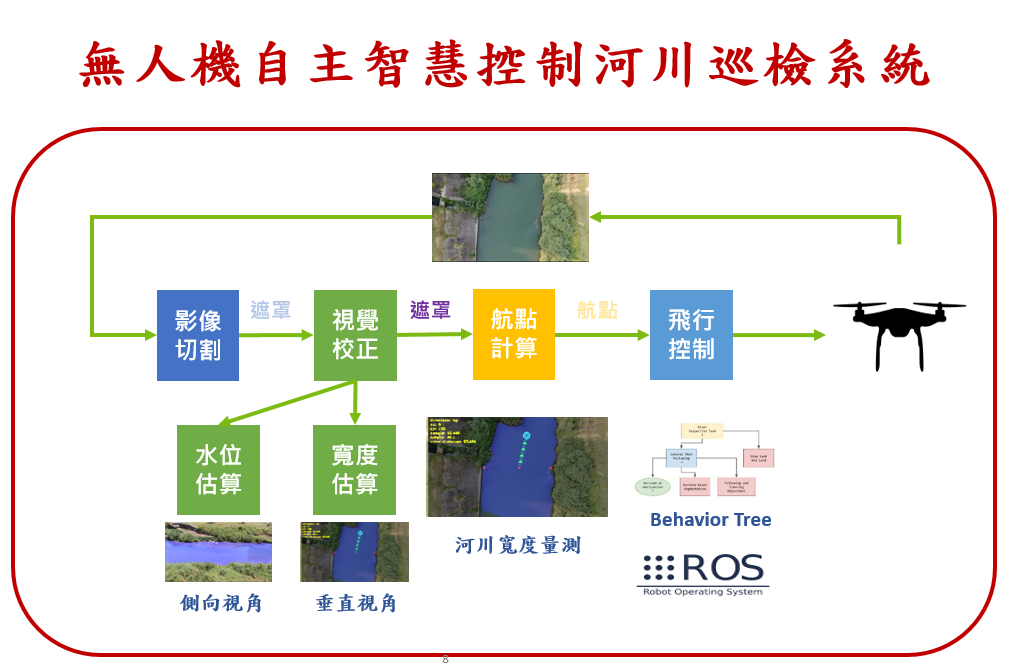
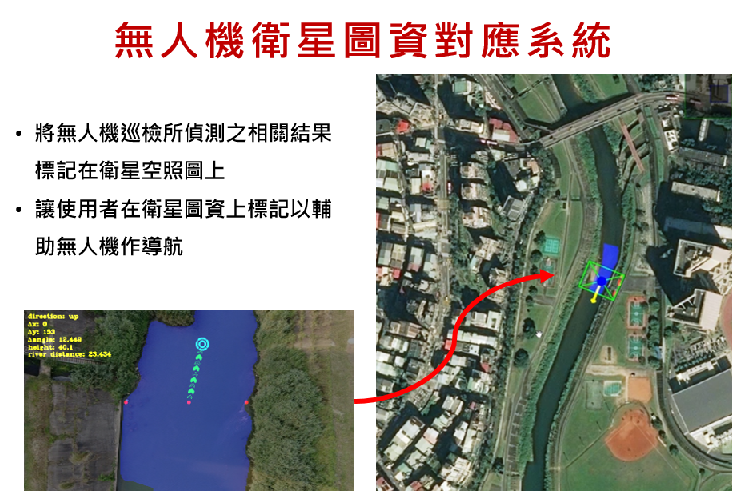
| 技術簡介 | 本技術透過影像辨識、電腦視覺、飛行控制、行爲決策等模組技術,整合一套能獨立完成預先設定之河川巡檢任務的自主無人機巡檢系統,並透過衛星圖資將現有各地方單位之河川靜態物聯網資料整合,增強資料的完整性,並嘗試解決河川管理所面臨的資料及資源調配缺口。 |
||
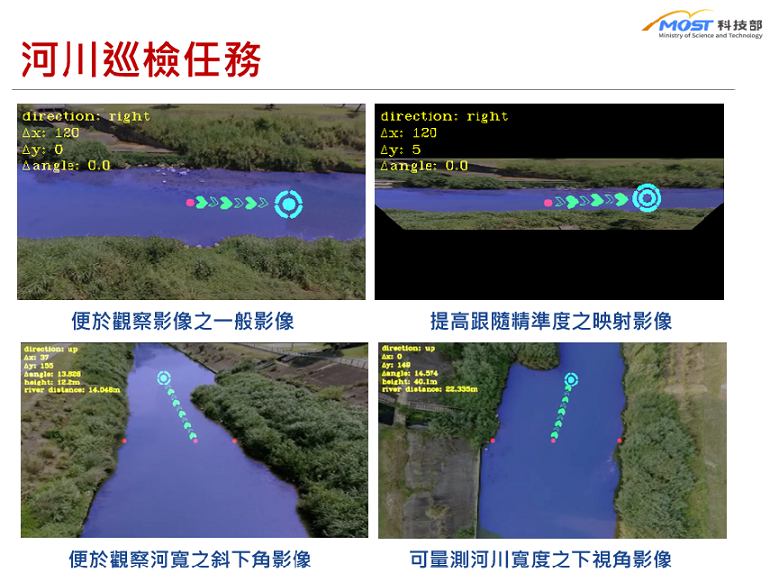
| 科學突破性 | 本技術透過決策模型將不同的技術模組整合在一起,並在真實環境中進行實地驗證,測試並證明無人機能自主跟隨河川進行巡檢任務。該技術將視覺感知及飛行控緊密的結合,而為使得無人機能更即時反應,對視覺模型進行輕量化,最後結合空間量測及定位技術,藉由 GPS 及空照圖的輔助更精準地定位出物件位置。 |
||
| 產業應用性 | 本技術可有效補足資料並提供一個更綜觀的角度給河川管理人員,協助他們在相對低的成本下,定期且更全面地更新河川資料,支援資源調度的決策。本技術不僅適用於水文資訊及河川管理,也能提供不同產業新的解決方案,透過無人機所提供的影像,可提供不同情境的決策資訊,如:災場的先行探勘及受災調查、高鐵鐵軌檢測。 |
||
| 關鍵字 | 無人機 河川巡檢 物聯網 人工智慧 機上運算 視覺導航 視覺量測 空間定位 自主控制架構 即時運算 | ||
- 聯絡人
- 宋如泰
- 電子信箱
- archsoong@gmail.com
其他人也看了