



| Technical Name | UAV Building Inspection using SLAM | ||
|---|---|---|---|
| Project Operator | National Chengchi University | ||
| Project Host | 劉吉軒 | ||
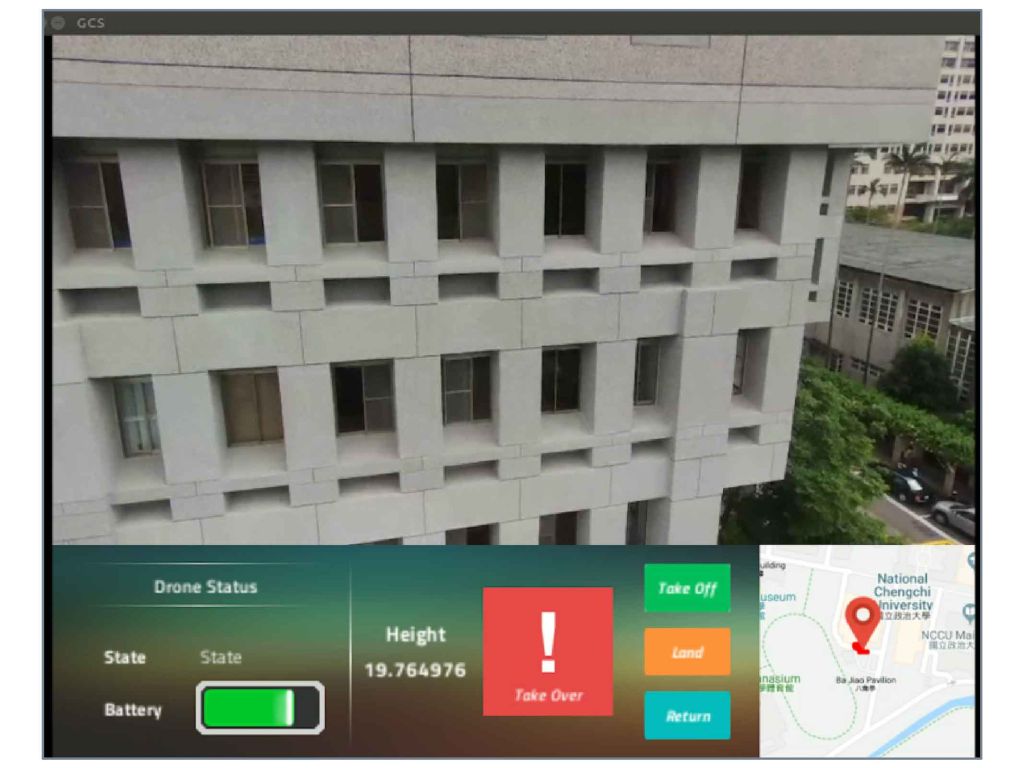
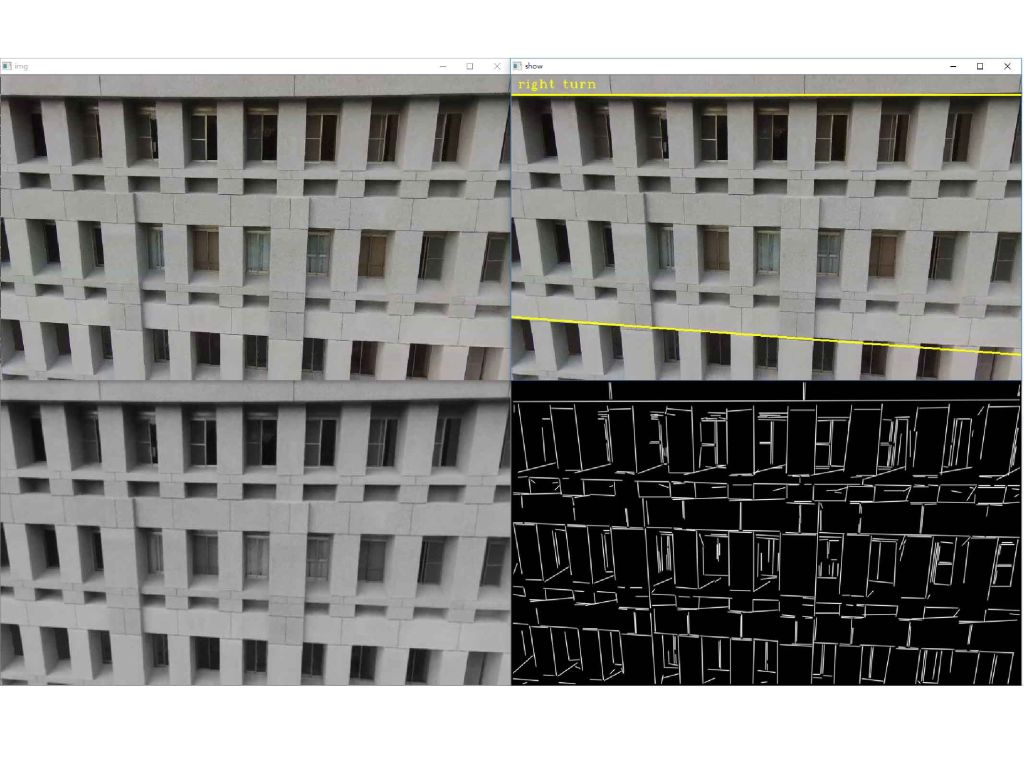
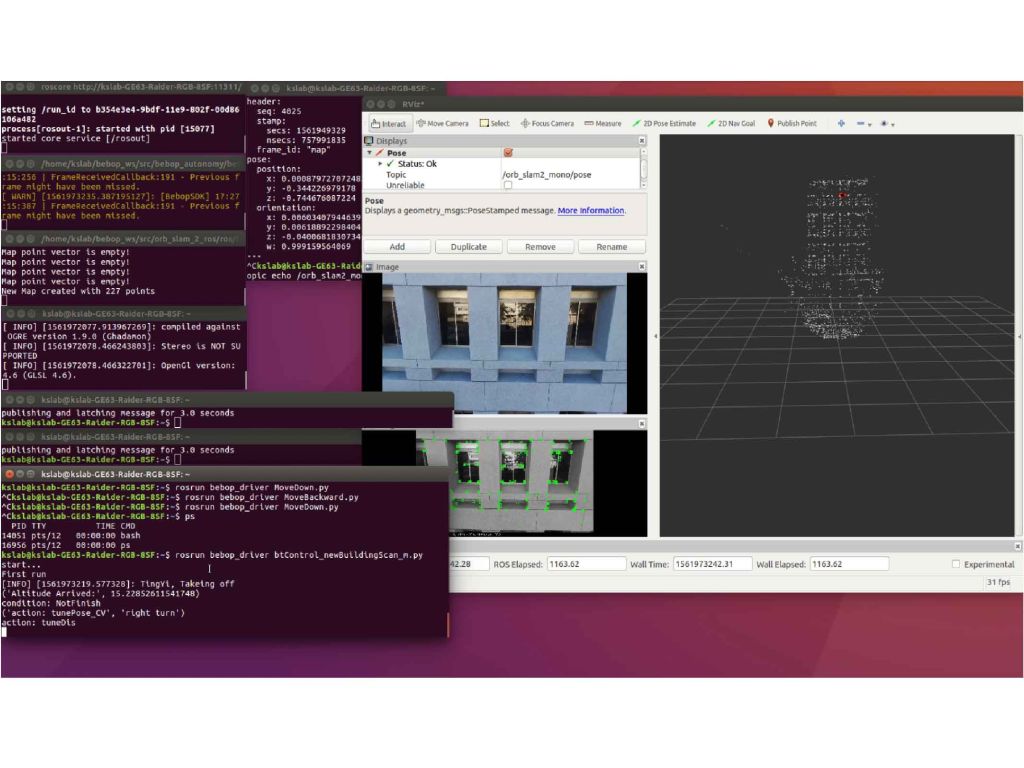
| Summary | This technology uses path planning, computer vision,behavior control techniques to build an autonomous UAV Intelligent system to perform building inspection. The user can activate the UAV using our ground station, the UAV will then starts to perform building inspection based on given waypoints, after finishing its mission it will return to its take-off pointproduce an inspection video. |
||
| Scientific Breakthrough | Current researchdevelopment of UAV focused more on specific technologieslacks a more comprehensive system to enable autonomous UAV to perform various missions. Our UAV system has been tested in a real environment, it has better fault tolerance. when an error happens, the UAV system will save its current state to enable user to resume mission after eliminating errors. |
||
| Industrial Applicability | This technology can be used to support the acceptance of building renovation, important facilities that needed regular reviewed from multiple perspectives to ensure safety, also useful in assessing the current state of a building. |
||
| Keyword | UAV Autonomous Intelligent System Behavior Tree SLAM Ground Control Station Real-Time Computing Computer Vision 路徑規劃 空間模型 使用者介面 | ||
- archsoong@gmail.com
other people also saw