



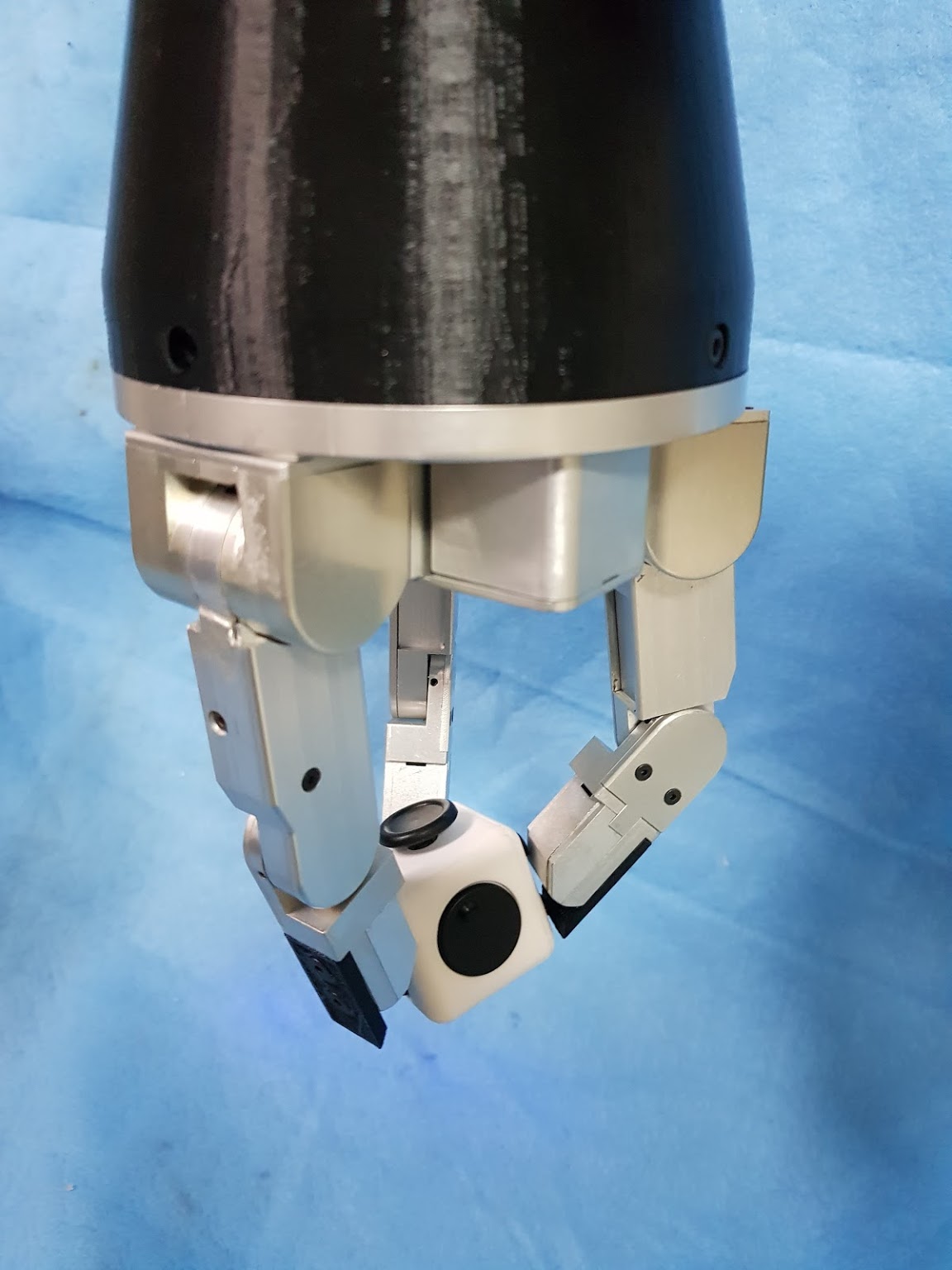
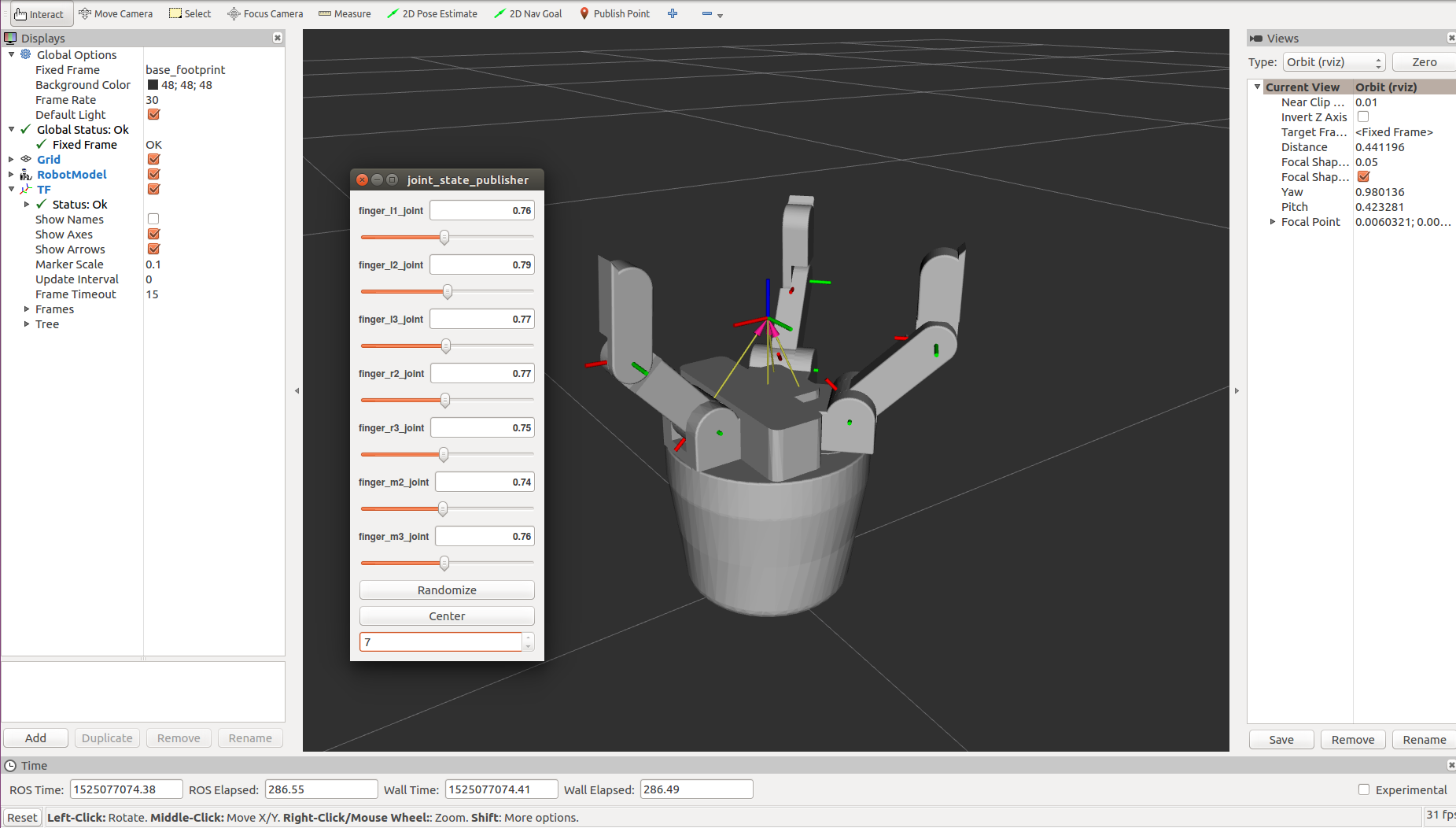
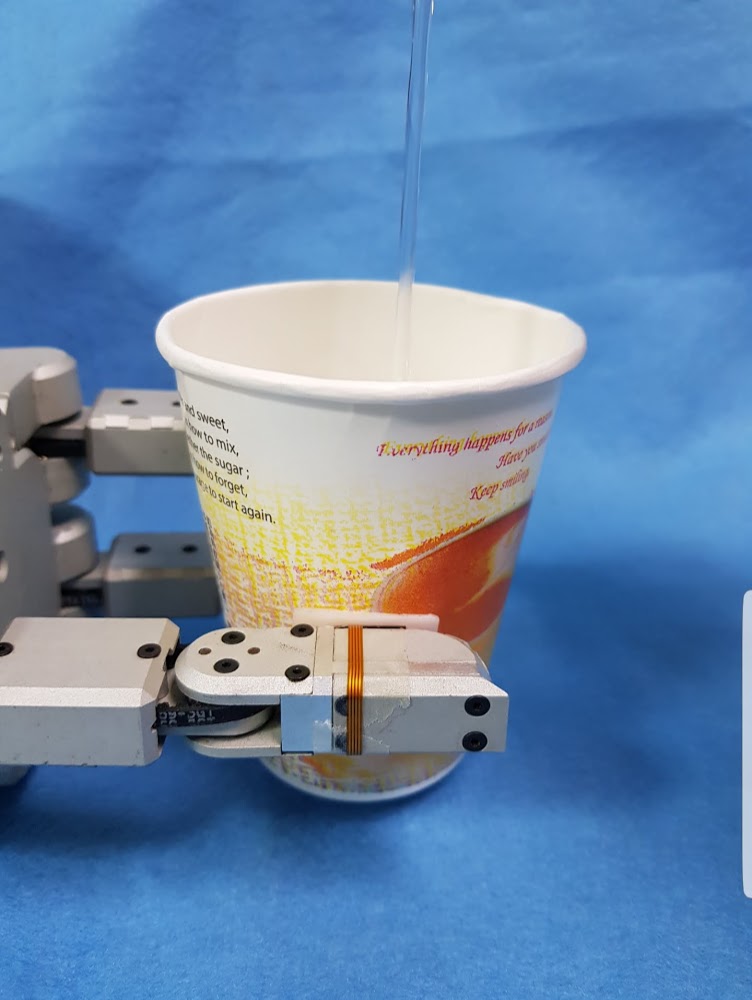
| Technical Name | Smart robotic hand with 3D tactile sensors | ||
|---|---|---|---|
| Project Operator | National Taipei University of Technology | ||
| Project Host | 黃榮堂 | ||
| Summary | "1. Low cost 2. Power force 3. Finger with self-locking 4. ROS based control environment 5. Human-machine interface 6. Adopt CAN-BUS transmission 7. Pressure & shear 3D force sensor by capacitancemagnet 8. Adaptive multi-degree-of-freedom jaws with 3D vision" |
||
| Scientific Breakthrough | - |
||
| Industrial Applicability | - |
||
| Keyword | __ | ||
- futuretech.most@gmail.com
other people also saw