



| 技術名稱 | 可物件辨識及追蹤之內藏式視覺整合自適應夾爪 | ||
|---|---|---|---|
| 計畫單位 | 國立清華大學 | ||
| 計畫主持人 | 張禎元 | ||
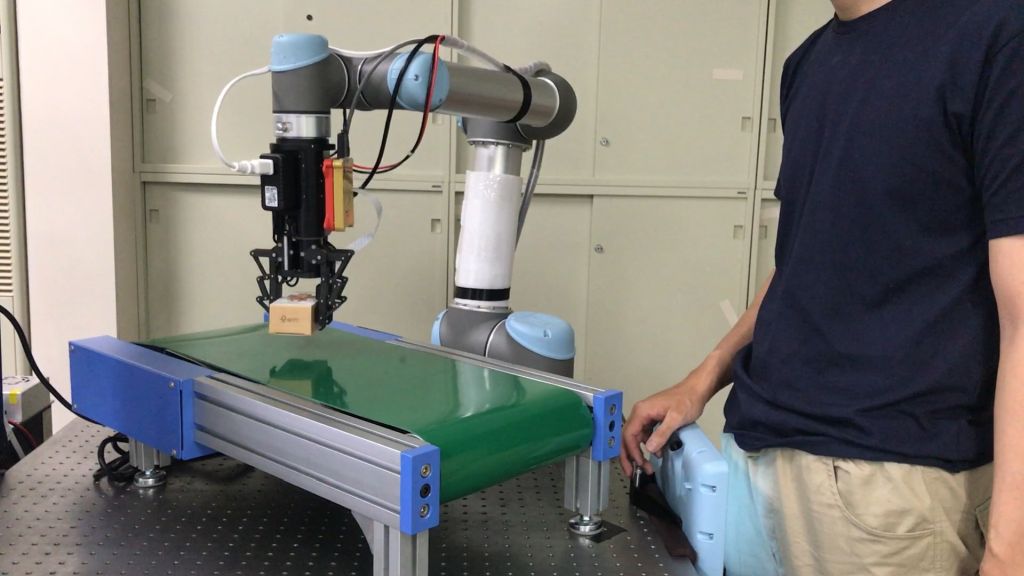
| 技術簡介 | 本技術主要涵蓋有三大特色 自適應夾爪結構透過其多重自由度且欠驅動連桿的特性,抓握時夾爪隨物件自動變形,提供迅速穩定的抓握。 內嵌式視覺辨識模組將視覺模組整合於夾爪,提供更為準確的物件座標,且不因機械手臂姿態導致部分視野被遮擋。 整合式視覺導引對視覺資訊做初步的辨識及處理,可直接依靠夾爪進行物件追蹤 |
||
| 科學突破性 | 1. 自適應夾爪設計,可隨不同物件做出不同的抓取動作,全面提升各場域的泛用性。 2. 內藏Eye-in-Hand近場感測模組,透過內嵌視覺辨識模塊,自動判斷物件形狀以及位置,減少因遮蔽無法使用視覺之困擾。 3. 整合式夾爪及感測器,自動導引機械手臂運作,迅速且確實的夾取隨機物件,並大幅降低智慧產線 |
||
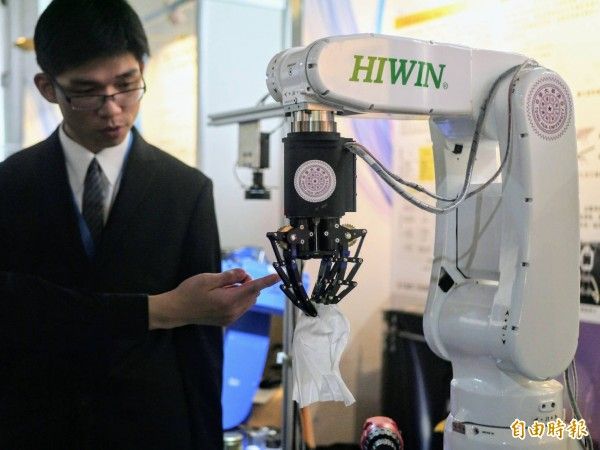
| 產業應用性 | 1.自適應之夾爪構型:相較於市場主要競爭廠商,由NTHU開發的自適應夾爪,透過其自適應結構設計,更能輕鬆對應形狀較不規則的物件,且成本低廉極具商業潛力。 2.近場感測器之應用:透過整合式Eye-in-Hand感測器降低座標轉換之複雜度,並搭配整合式控制器,可直接導引機械手臂運作,大幅降低智慧產線建 |
||
| 關鍵字 | 近場感測系統 物件辨識 物件追蹤 機器視覺 自適應夾爪 欠驅動夾爪 機械夾爪 四連桿結構 視覺導引系統 手眼校正 | ||
| 備註 | 影片網址: https://drive.google.com/file/d/1-Vi5-7u4XAX0anV0W0nSjwUZfsgO7AfV/view |
||
- 聯絡人
- 鄭力維
- 電子信箱
- lwcheng@gapp.nthu.edu.tw
其他人也看了