



| Technical Name | Eye-in-hand Adaptive Gripper for Object RecognitionTracking | ||
|---|---|---|---|
| Project Operator | National Tsing Hua University | ||
| Project Host | 張禎元 | ||
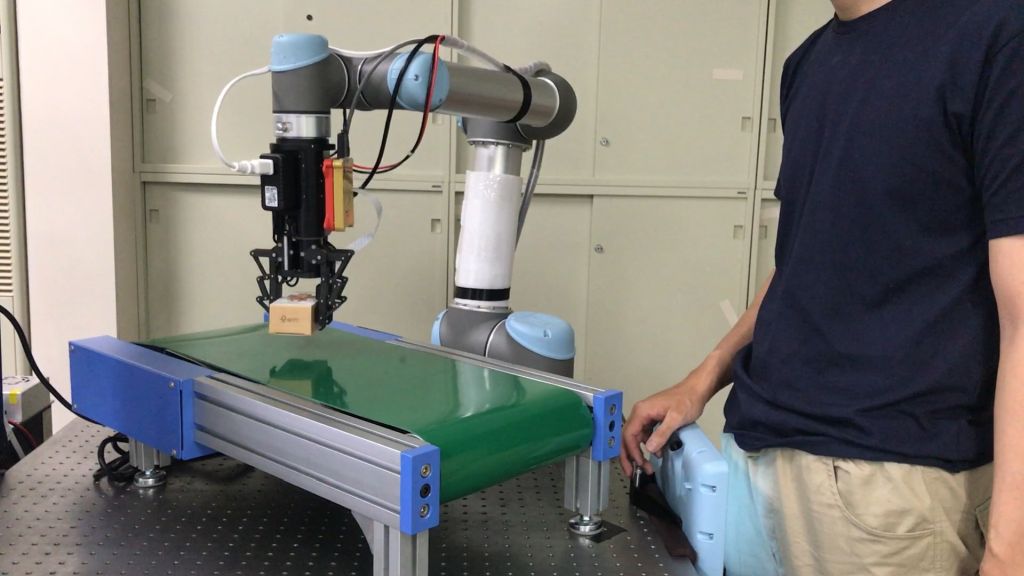
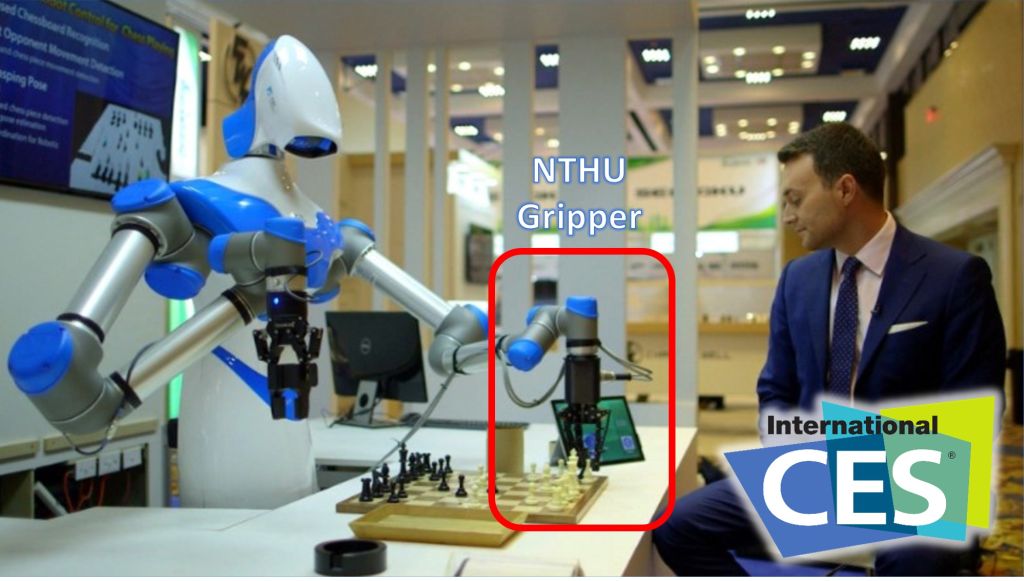
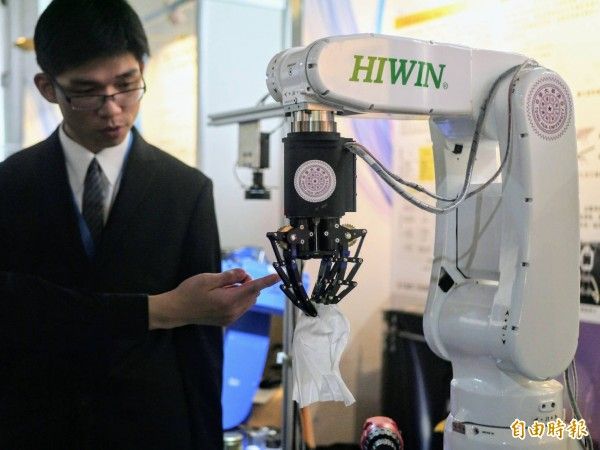
| Summary | This research is mainly divided into three sections. 1. Based on the adaptive gripper's multi-degree of freedomunder-actuated link characteristics, the finger's orientation is modified during gripping. 2. The embedded vision recognition module can handle the blocking of vision. 3. With visual guiding system, the gripper can perform preliminary identification,thus achieve the goal of |
||
| Scientific Breakthrough | 1. The design of compliance mechanism has self-adjusted ability to grasp random objects, which promotes the applicability of the gripper in industrial fields 2. The design of Eye-in-hand module can overcome the existing problems of vision module. 3. The integration of embedded vision module can guild the robotic arm to pick up random objects precisely. It can also reduce the cost of building a sm |
||
| Industrial Applicability | 1. Adaptive mechanism: Compared with the other products in the market, the adaptive gripper developed by NTHU is more competitiveaffordable. It can easily grab irregularly shaped objects through adaptive mechanism design. 2. Sensor integration: The gripper with integrated sensorthe embedded control system can guide the robotic arm without any other vision sensors that dramatically reduc |
||
| Keyword | Eye-in-hand Eye-on-hand Eye-to-hand Object Recognition Object Tracking Computer Vision Adaptive Gripper Underactuated Gripper Redundant Linkage Mechanism Robotic Gripper | ||
- lwcheng@gapp.nthu.edu.tw
other people also saw