



| Technical Name | Self-powered, active,perfect-flexible robotic skinsactively perceivingresponsive soft robots | ||
|---|---|---|---|
| Project Operator | National Chung Hsing University | ||
| Project Host | 賴盈至 | ||
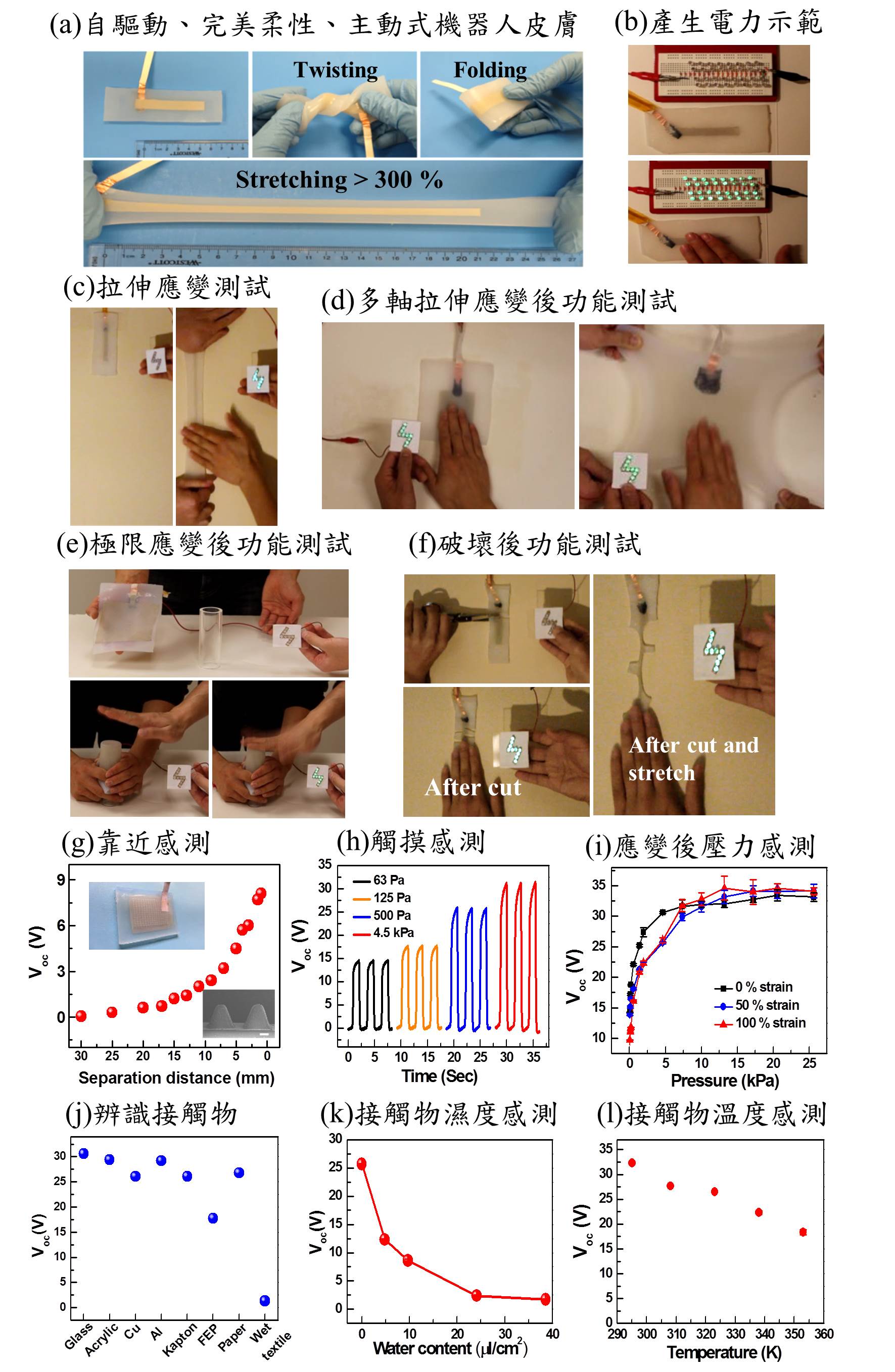
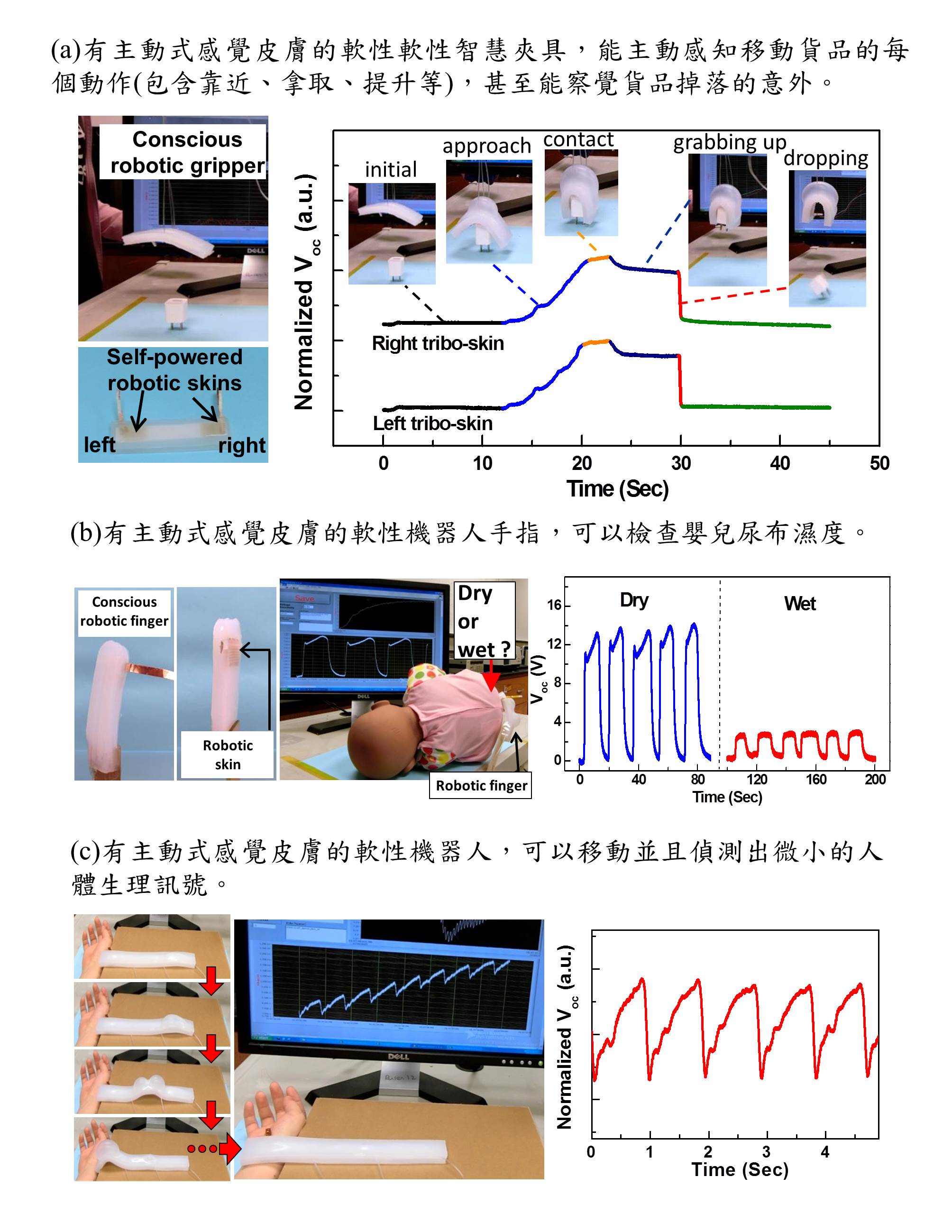
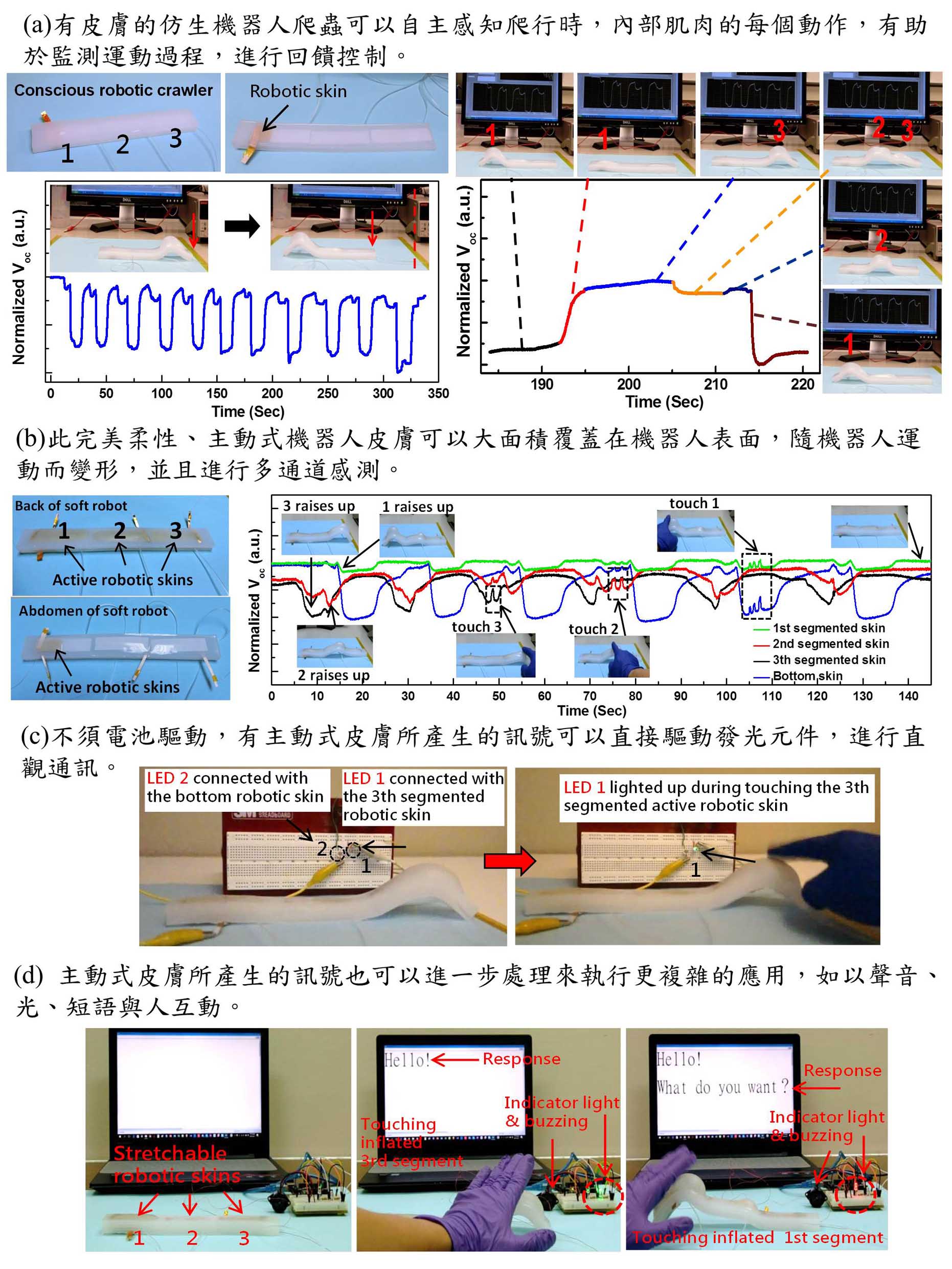
| Summary | Mimicking human skinsmolluscan, the self-poweredsuper-soft active robotic skinactively perceivableresponsive soft robots are demonstrated for the first time. The robotic skins with perfect flexibility can actively sense external stimuli via self-generating electricity. The driving energy comes from the natural triboelectrification. The perfect integration of the robotic skinssoft actuators enables soft robots to perform various actively perceivinginteractive tasks. |
||
| Scientific Breakthrough | The robotic skin can actively sense external stimuli via self-generating electricity despite under extreme mechanical deformationseven after damage. Such abilityperfect mechanical properties are never happened before. And, for the first time, actively perceivingresponsive soft robots integrated with the skins can sense externalinternal stimuli (such as motions, working states, e |
||
| Industrial Applicability | The presented skin that is self-powered, active, highly-sensitive, highly-flexible, practicable,low-cost can meet a wide range of applications where smart interactive interfaces are needed. And, the first achievements in the actively perceivingresponsive soft robots can push the boundaries of artificial intelligence, robotics, as well as their vast applications. These works will make a r |
||
| Keyword | __ | ||
- futuretech.most@gmail.com
other people also saw