



| Technical Name | 單視覺影像比對式與超寬頻之室內定位技術 | ||
|---|---|---|---|
| Project Operator | National Chung Hsing University | ||
| Project Host | 黃穎聰 | ||
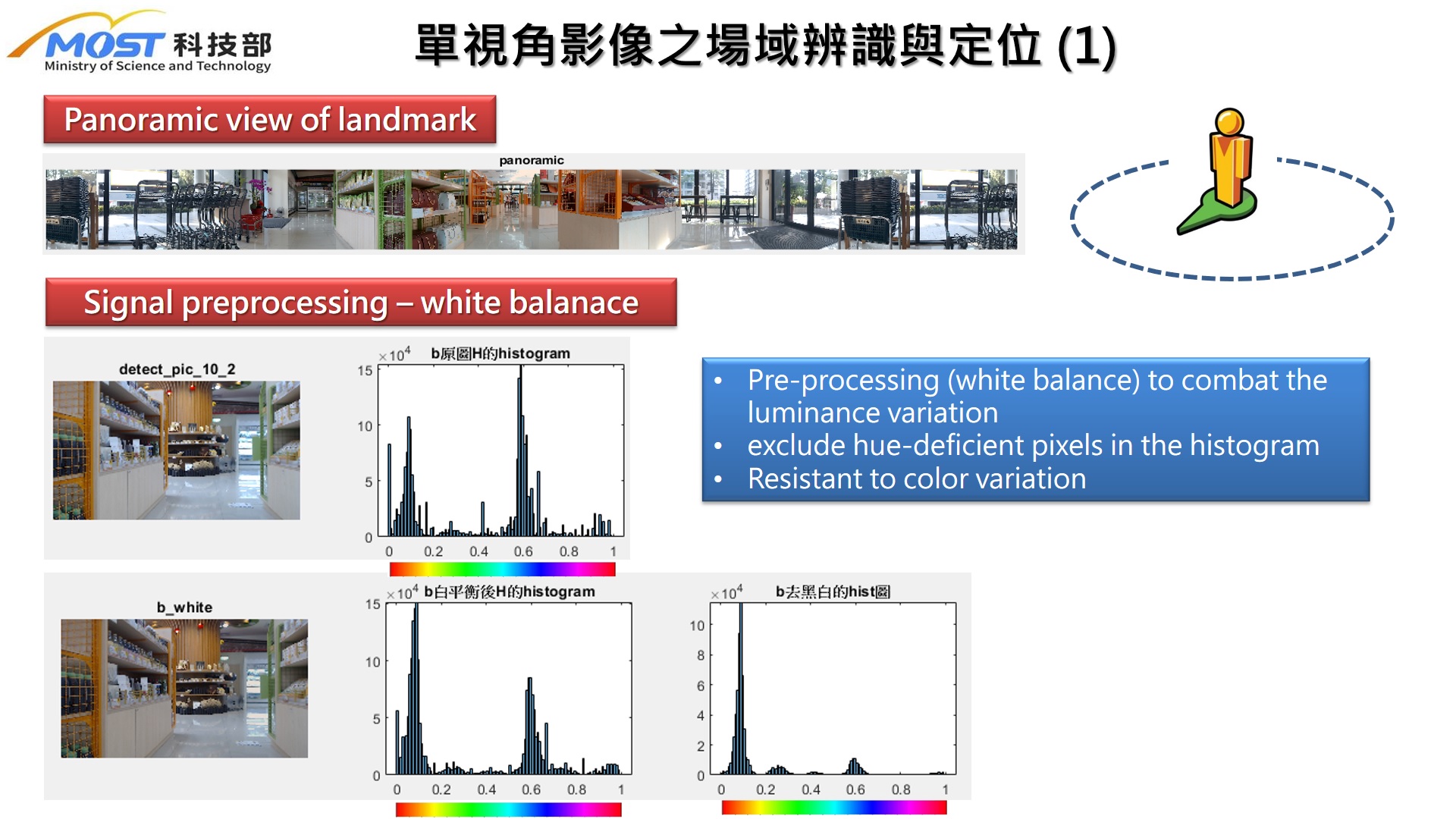
| Summary | Two indoor positioning techniques are presented. The first one is a monocular vision based landmark matching scheme for identifying absolute indoor locations. The scheme requires just one photo shotmatches it with a landmark database to obtain the location. The landmark data base can be easily adapted to different fields. The proposed scheme is highly computing efficient. The correct landmark identification rate is up to 90the positioning accuracy is 1.5m. The second one is a relative positioning scheme based on ultra-wide band (UWB) technology. It can be employed on an automatic guided vehicle (AGV) to implement the trailing function. The accuracy of positioning is 80cm. |
||
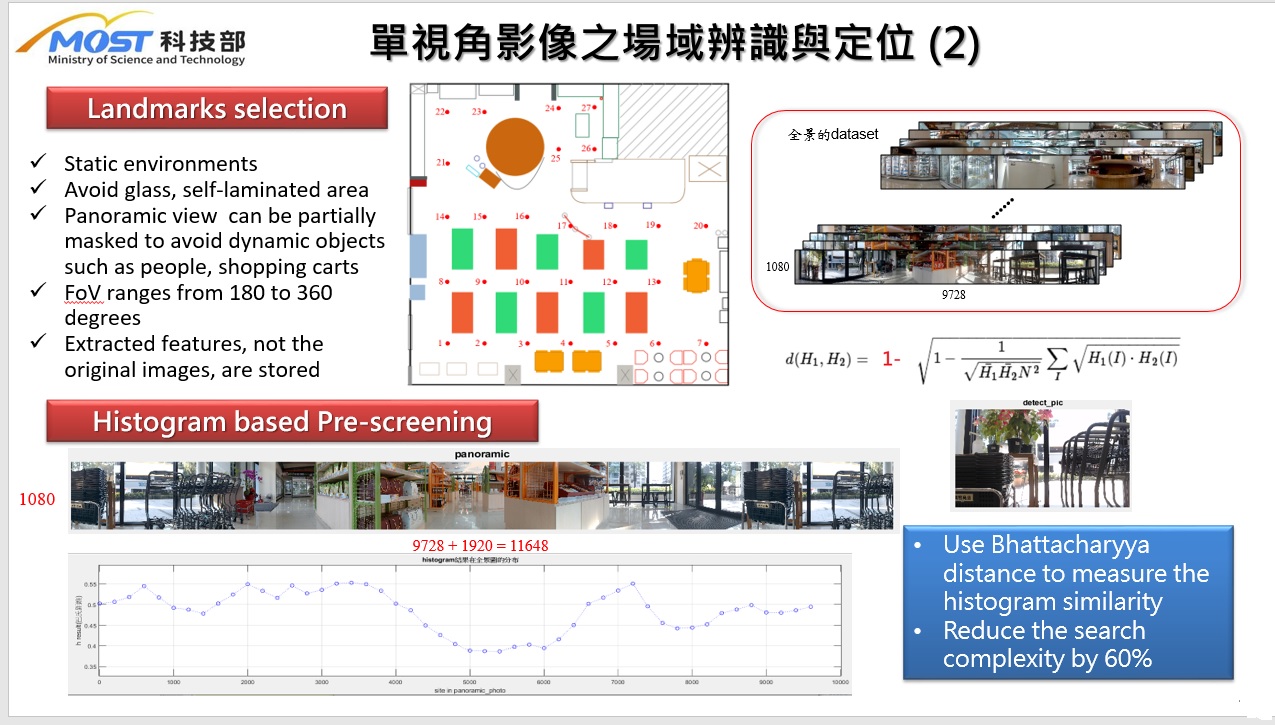
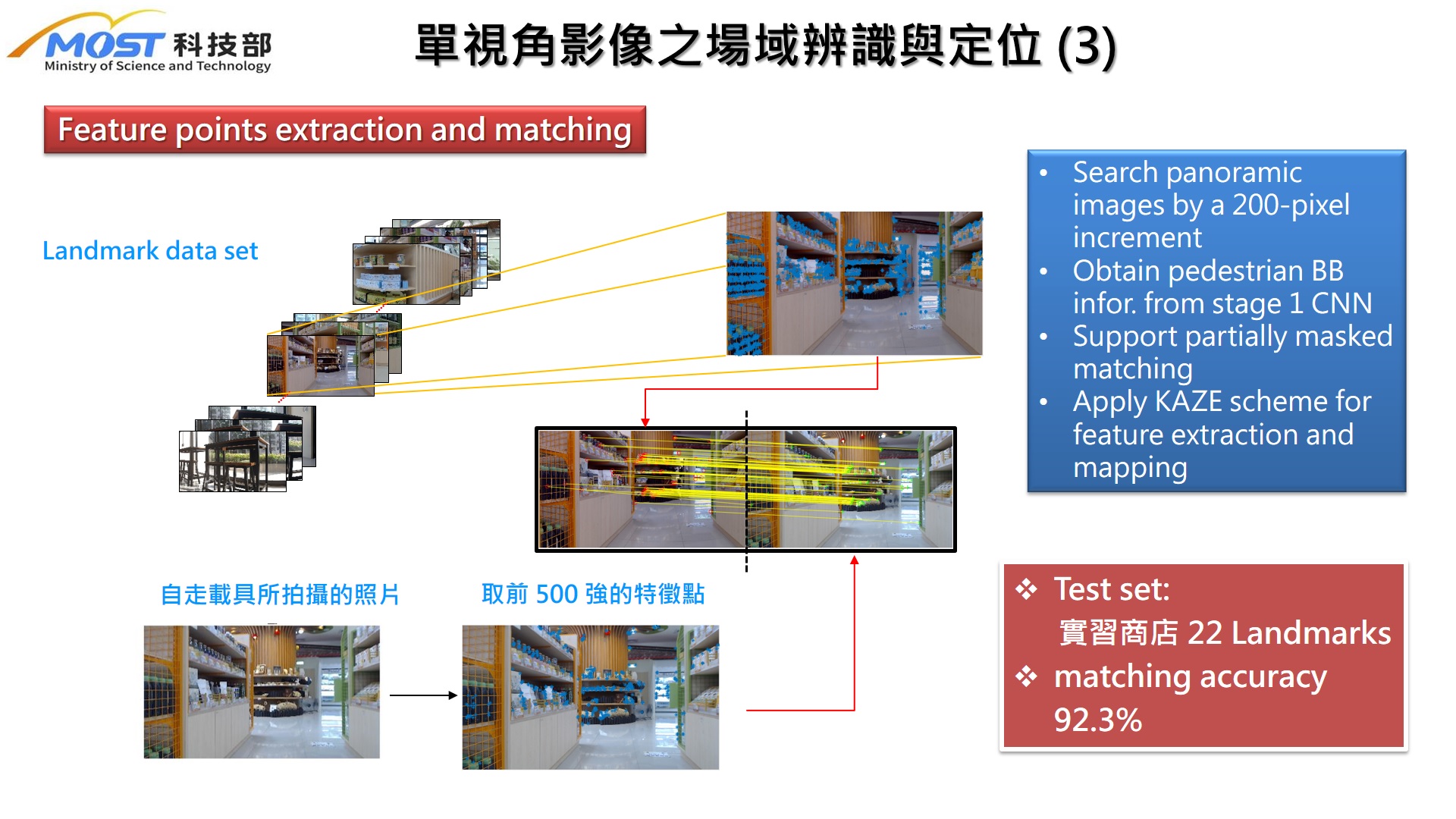
| Scientific Breakthrough | "The proposed monocular vision based landmark matching scheme for identifying absolute indoor locations features, - No video clip is needed. A minimum of one monocular image suffices the positioning. - The landmark data base for a particular field can be easily constructed with a low deployment cost. - Landmark feature extraction can be performed automaticallyno model training is needed. - Computing complexity of Feature extractionmatching can be reduced by 80 by an image screening scheme. - The correct landmark identification rate is up to 90the positioning accuracy is 1.5m." |
||
| Industrial Applicability | The proposed monocular vision based landmark matching scheme for identifying absolute indoor locations is adaptable to various fieldsrequires no extra hardware in deployment. At the user end, only a camera ready mobile phone plus an APP is good enough for positioning. It can be widely used in indoor environments such as shopping mallsMRT stations for navigationguiding purposes. It can also be applied to video SLAM for finding the initial location. The UWB based triangulation scheme can be used in automatic shopping cartsguided vehicles to support trialing functions. |
||
| Matching Needs | 天使投資人、策略合作夥伴 |
||
| Keyword | monocular image image matching indoor positioning SLAM landmark image image feature points extraction triangulation all around image image stitching automatic guided vehicle | ||
- shuchi@dragon.nchu.edu.tw
other people also saw