



| 技術名稱 | 單視覺影像比對式與超寬頻之室內定位技術 | ||
|---|---|---|---|
| 計畫單位 | 國立中興大學 | ||
| 計畫主持人 | 黃穎聰 | ||
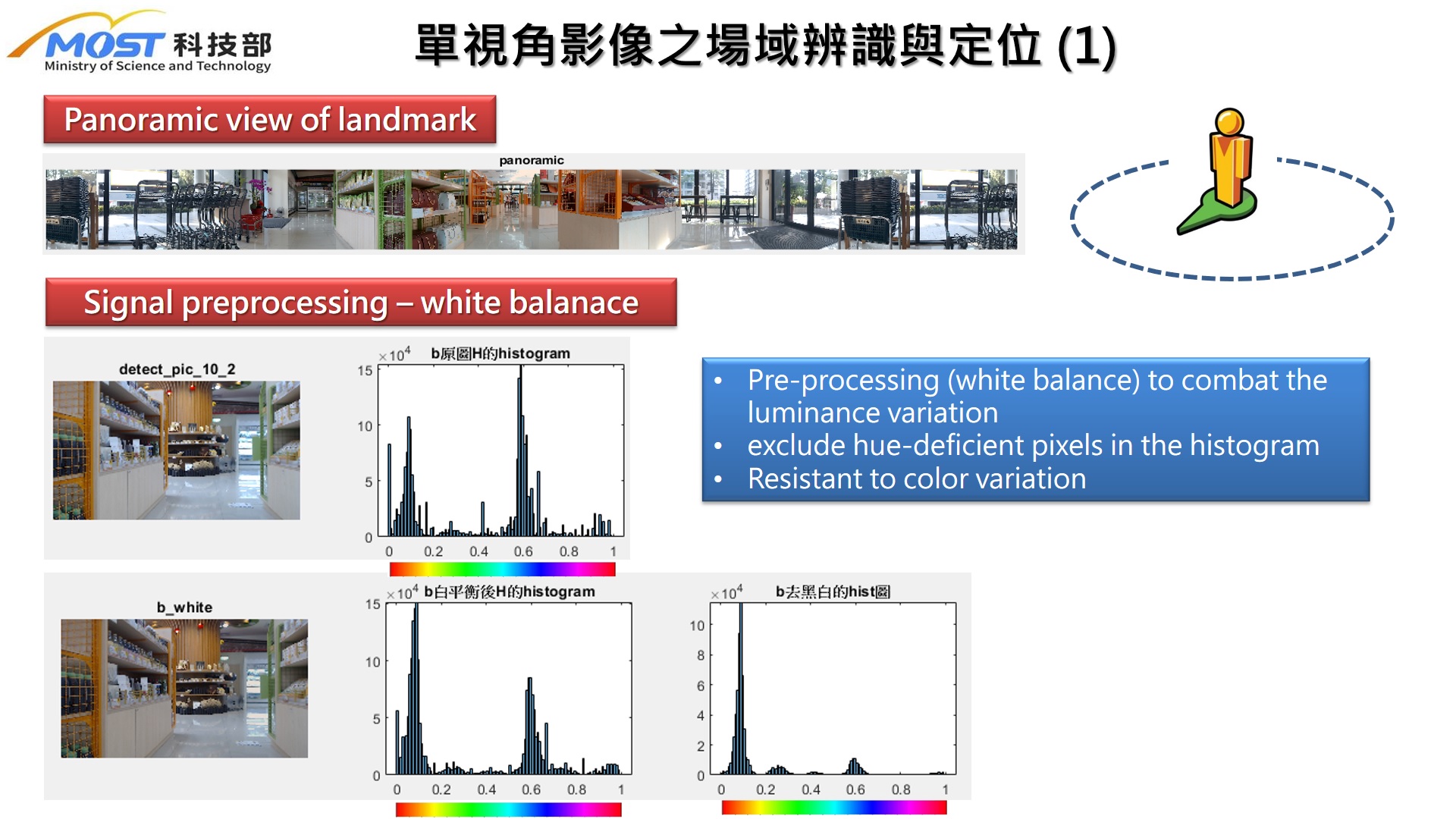
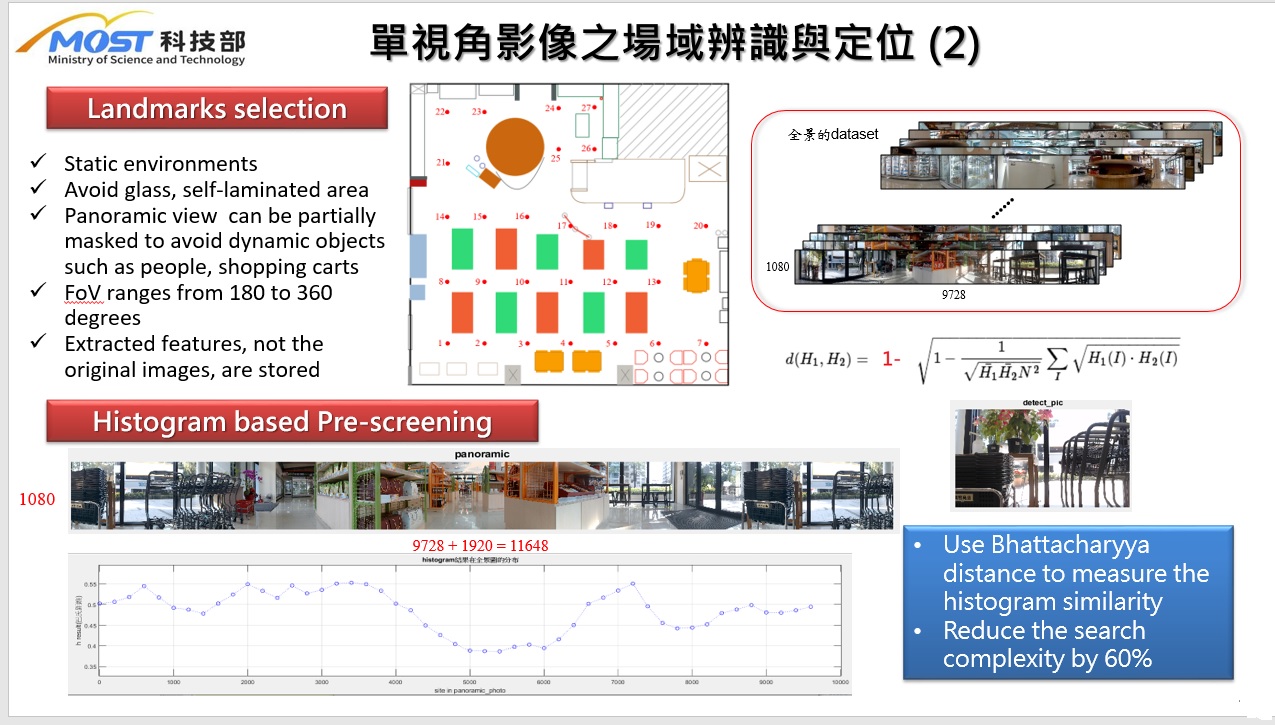
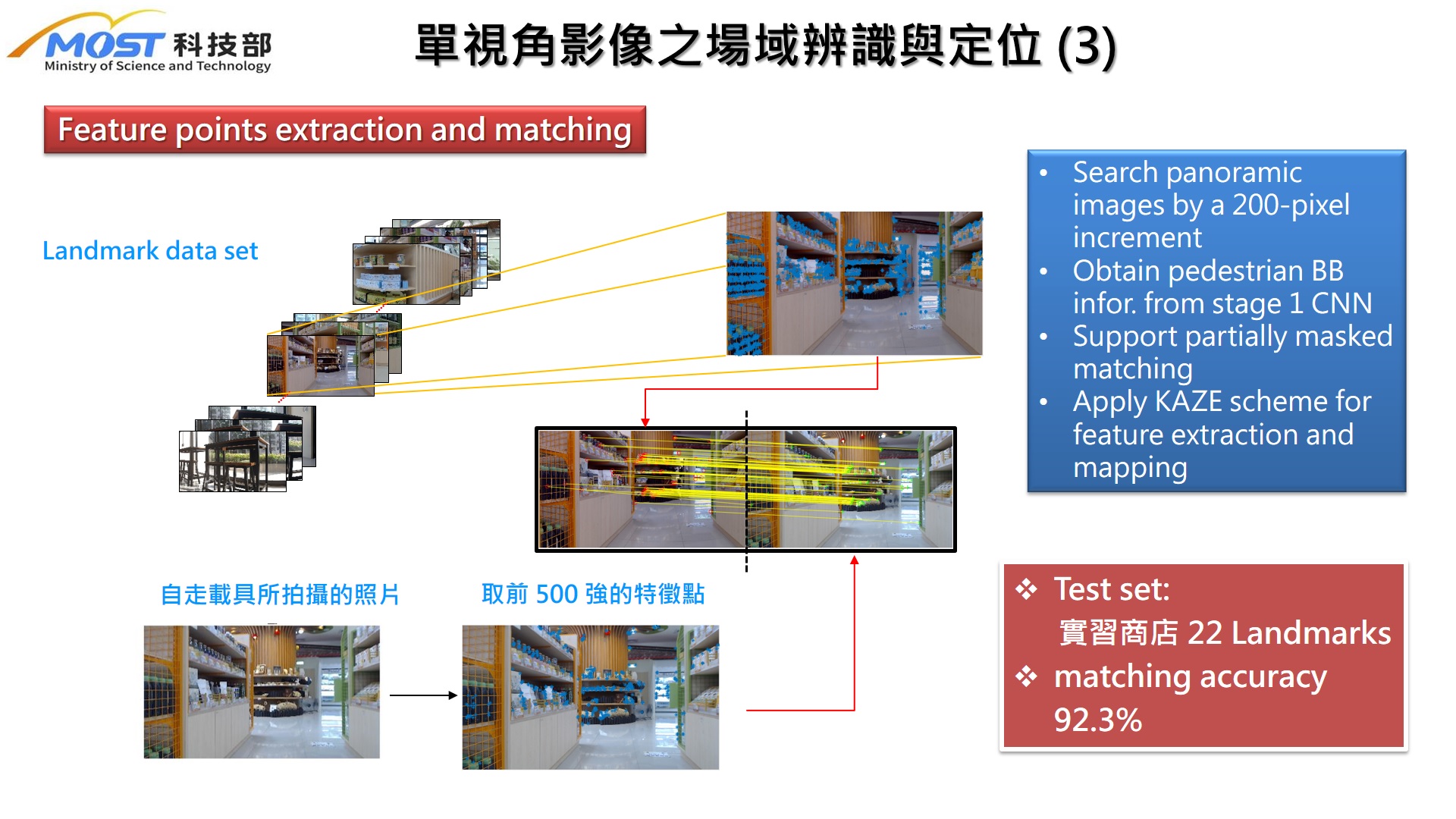
| 技術簡介 | 提出兩項適用於室內的定位技術。其一是單視覺影像比對式絕對位置定位。不需要視訊,最少只需要一個角度的影像,與地標資料庫比對,即可進行定位。地標辨識成功率 90,而定位精確度可達 1.5m。其二是利用超寬頻技術作相對定位,可裝置在購物車或是無人搬運車上,實現自動跟隨功能。定位準確度可達80cm。 |
||
| 科學突破性 | 採用一般單視覺相機拍攝影像與地標影像資料庫比對的方式來進行室內位置判定與定位,不需要視訊資訊,最少只要一個角度的影像即可定位。地標影像資料庫建置成本低。使用影像預篩選技術,降低80 特徵點萃取與比對的運算量。地標辨識成功率 90,採用多個特徵點聯立求最小誤差解的方式,提升定位精確度至 1.5m。 |
||
| 產業應用性 | 其一的單視覺地標影像比對式室內絕對位置定位技術,可以廣泛的應用在室內場所例如賣場、捷運站、地下街的定位與行進引導。也可應用在自走載具的video SLAM功能上,作為初始位置定位的功能。其二的超寬頻訊號之相對定位技術,可裝置在購物車或是無人搬運車上,實現自動跟隨功能。 |
||
| 媒合需求 | 天使投資人、策略合作夥伴 |
||
| 關鍵字 | 單視覺影像 影像比對 室內定位 同時定位與地圖建構 地標影像 影像特徵點萃取 三角定位 全景影像 影像縫合 無人搬運車 | ||
- 聯絡人
- 詹淑琪
- 電子信箱
- shuchi@dragon.nchu.edu.tw
其他人也看了