| 技術名稱 |
機器人導航之虛擬導引技術 |
| 計畫單位 |
國立清華大學 |
| 計畫主持人 |
賴尚宏 |
| 技術簡介 |
本技術獲得2020年NVIDIA AI at the Edge世界第二名,得獎網址如下:
https://tinyurl.com/ydc7s9fc
https://tinyurl.com/y7k3lw2b
本計劃提出一套高效能、低成本、易於實作的機器人自駕導航系統,並研發「虛擬指引」(“Virtual Guide” ) 技術。
該系統毋須裝配雷達、深度相機、傳感器等高單價設備,僅消單一相機做為視覺輸入,結合強化學習和語意分割等技術,便可在不失去效能的前提下完成自我定位、規劃路徑、目的地導航等功能。
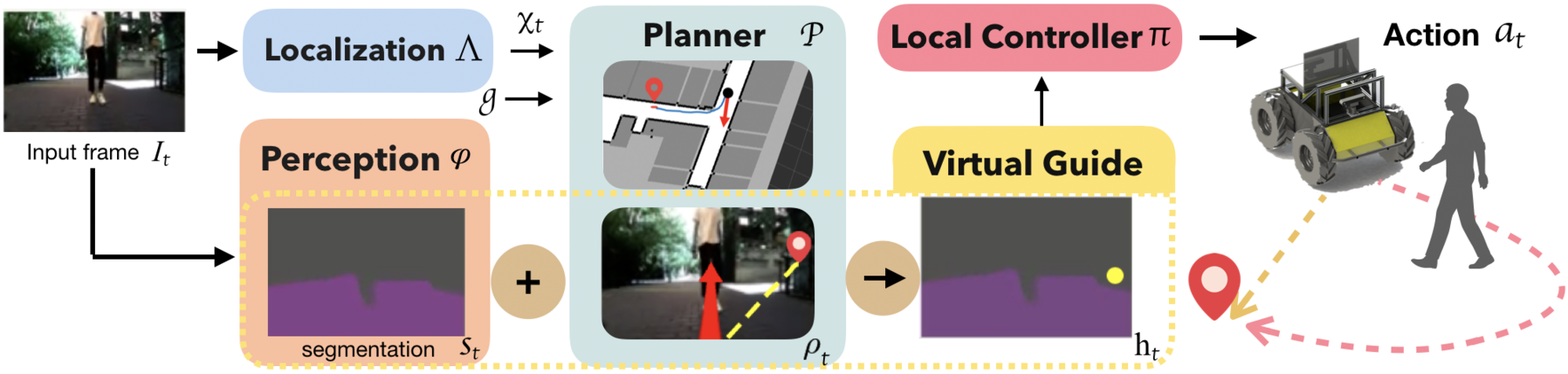
我們將此系統細分成定位模組、路線規劃模組、影像分析模組,以及操控模組四個區塊。首先,「定位模組」會分析由相機輸入的影像,擷取現實環境中的特徵點,進而定位機器人自身的位置;與此同時,「影像分析模組」會經由機器學習處理影像資料,以色塊區隔道路與障礙物;緊接著,這些資訊將會傳送給「路線規劃模組」進行運算,實時規劃出一條前往終點的最佳路徑,並整合影像資料及該路徑資訊,轉化成 “Virtual Guide” 的形式,傳送給最終的「操作模組」進行正確移動或避障。 同時,系統引進了 “Sim-to-Real” 技術,結合上述語意分割的技術,彌平了虛擬及現實環境之間的差異,使強化學習 (Reinforcement Learning) 得以在「操作模組 (Local Controller Module)」中進行虛擬訓練,不但徹底消除了機器人在現實環境訓練的高風險,亦受惠於平行計算的優勢,使訓練效率倍數成長。
其中,“Virtual Guide” 是我們提出的嶄新概念,它的功能在於逐步引導自駕車抵達目的地。相對於傳統做法,該方法在減少誤差的情況下,有效整合了路徑及影像資料。“Virtual Guide”,能夠有效搭建起「路徑規劃」和「路徑跟隨」的溝通橋樑。
經過完備的實驗測試,我們證明了該 AGV自動導航駕駛系統,不但可以駕馭各種複雜的環境,在面對不熟悉甚至是陌生的場景時,仍能在不碰到障礙物的前提下順利行駛、完成導航任務。
整體而言,我們證實了此企劃的可行性以及成熟度,已足以勝任多面向的現實需求。本企劃所提出的系統,非但展現了卓越的適應能力,也確保面對陌生的場域及環境時,能臨機應變、保持穩定,且更適合應用無人飛行機、掃地機器人、校園導覽機器人、AI送餐等低成本情境上。 |
| 科學突破性 |
本企劃致力於研擬一套以視覺影像作為輸入的機器人自我導航系統,並提出演算方法,使機器人能夠理解視覺影像、判斷適應決策、順利完成導航任務。本企劃提了一套全新的模組化架構,藉由消弭虛擬場域及現實世界之間的視覺資訊差異,使訓練能完全運行在虛擬維度之中,有效減少了蒐集及處理現實訓練數據的高額成本。 |
| 產業應用性 |
我們成功研擬了一種引導機器人前往目的地的虛擬信號Virtual Guide,有效搭建起路徑規劃和路徑跟隨的溝通橋樑。本企劃所提出的系統,非但展現了卓越的適應能力,也確保面對陌生的場域及環境時,能臨機應變、保持穩定,且更適合應用無人飛行機、掃地機器人、校園導覽機器人、AI送餐等低成本情境上。 |
| 關鍵字 |
智慧型機器人 電腦視覺 語意分割 虛擬至真實轉移學習 同步定位與地圖構建 深度增強式學習 虛擬環境機器人訓練方法 虛擬環境建置方法 平行嵌入式系統叢集 機器人虛擬導引技術 |
| 備註 |
本技術獲得2020年NVIDIA AI at the Edge世界第二名,得獎網址如下:
https://tinyurl.com/ydc7s9fc
https://tinyurl.com/y7k3lw2b
國立清華大學電機資訊學院專題競賽金牌獎 (第一名)
國立清華大學資訊工程學系專題競賽特優 (第一名) |