





| Technical Name | Smart Weeding Robot | ||
|---|---|---|---|
| Project Operator | Ming-hsin University of Science and Technology | ||
| Project Host | 蘇東興 | ||
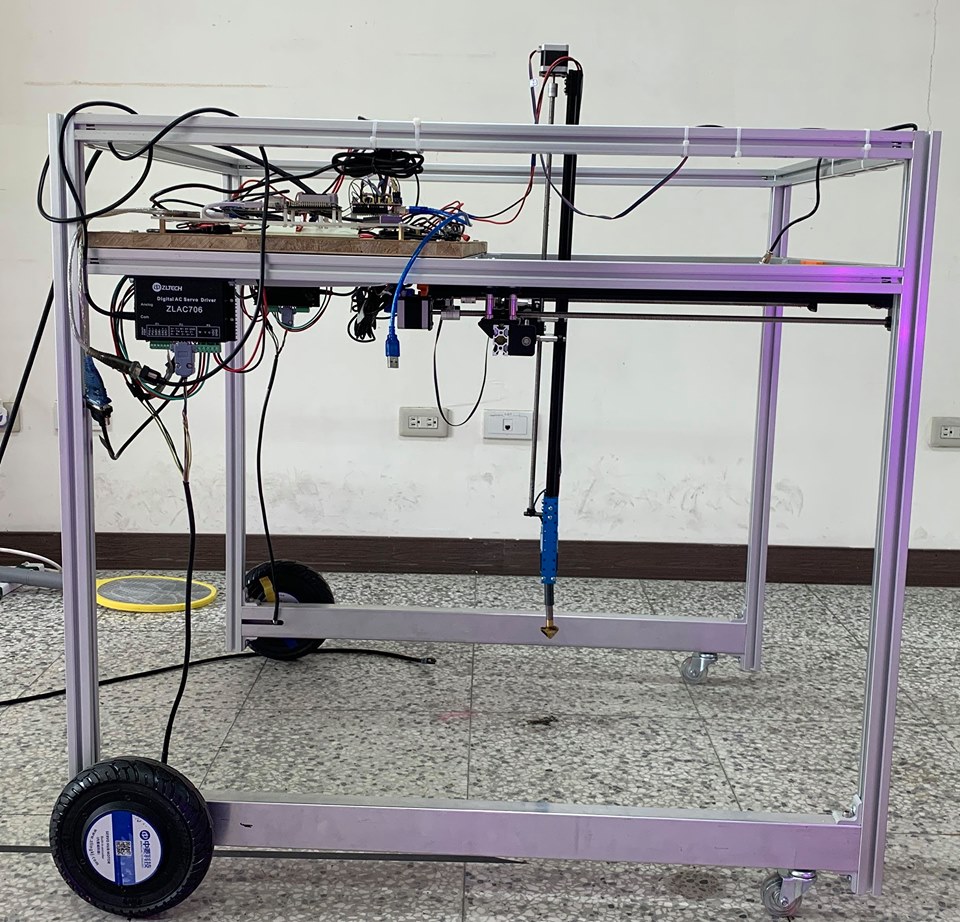
| Summary | Farmers worry that grassy fields will hide disease and insect pests or compete with crops for nutrients. The general weeding methods can be divided into mechanical and chemical formulas. The former relies on manual mowing or driving a lawn mower for weeding, which has a relatively high labor cost. The latter relies on spraying chemicals and has a significant herbicidal effect, but the relative side effects are also large. Therefore, the plan is to create a smart weeding robot that simulates a polystyrene box to grow vegetables and weeds. Using artificial intelligence deep learning technology to create a recognition engine to identify vegetables and weeds, with Google's Edge TPU Dev Board as the edge computing host. In addition to enabling the machine to automatically follow the track, after identifying the weeds, through positioning, the weeding blade is activated to physically weed, which achieves the benefits of intelligent weeding and reduced herbicide use. |
||
| Scientific Breakthrough | Walk automatically along the correct trajectory |
||
| Industrial Applicability | The herbicide has good weeding effect, but long-term use is harmful to the ring. Using deep learning to train the vegetable and weed identification system can accurately identify the location of the weeds. By using the physical method of weeding, one can avoid the ecological catastrophe caused by the chemical formula weeding method, and the other is weeding to save labor costs. |
||
| Keyword | Artificial Intelligence Deep Learning Automatic Tracking Automatic Weeding Edge Computing Herbicide Smart Agriculture Organic Agriculture Automated Machinery Object Detection | ||
- John550557152@gmail.com
other people also saw