




| Technical Name | The Control Development of Humanoid Robotic Arm Based on Deep Learning | ||
|---|---|---|---|
| Project Operator | National Taiwan Ocean University | ||
| Project Host | 謝易錚 | ||
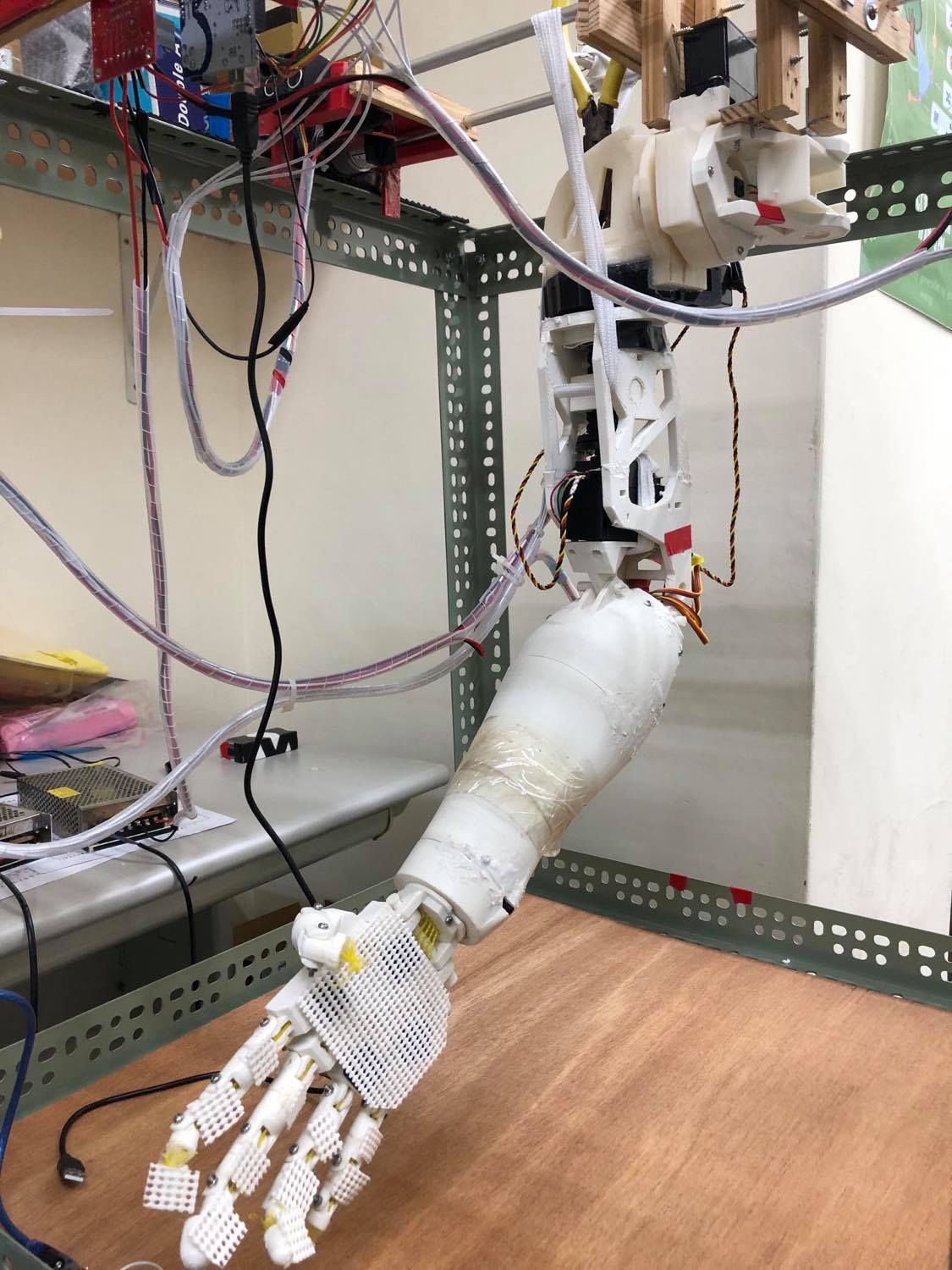
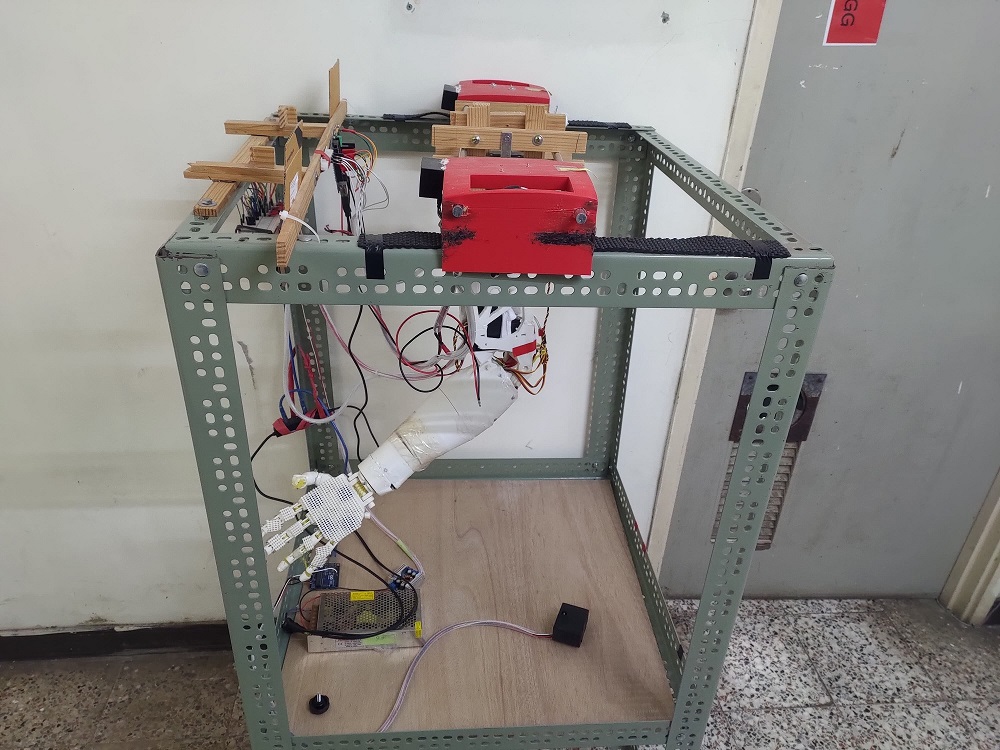
| Summary | In this topic, the purpose is to realize the system of robotic platform based on deep learning. As the main research method of this topic, the Generative Adversarial Network is used to establish the kinematics of robots, and the advantages and disadvantages between GAN and traditional mainstream models analyzed by kinematics. |
||
| Scientific Breakthrough | In this topic, we use the deep learning architecture to train and build a set of reverse kinematics models. Combining with an object recognition model at the same time, so that the robot has a certain item recognition ability to solve the error output caused by traditional inverse kinematics and data unevenness. |
||
| Industrial Applicability | When the robotic arm performs a task, it often encounters the problem of overcoming inverse kinematics. In the real world, the traditional inverse kinematics control arm will affect the overall output accuracy due to the poor environment or current state. |
||
| Keyword | Human robotic arm Generative Adversarial Network Object detection Deep learning Robot kinematics Deep Neural Network Embedded Systems Artificial intelligence Convolutional Neural Network Automated robot arm | ||
- yzhsieh@email.ntou.edu.tw
other people also saw