




| 技術名稱 | 人工智慧機械手臂控制加速晶片之虛實整合設計平台 | ||
|---|---|---|---|
| 計畫單位 | 國立清華大學 | ||
| 計畫主持人 | 金仲達、吳誠文、黃稚存、劉靖家 | ||
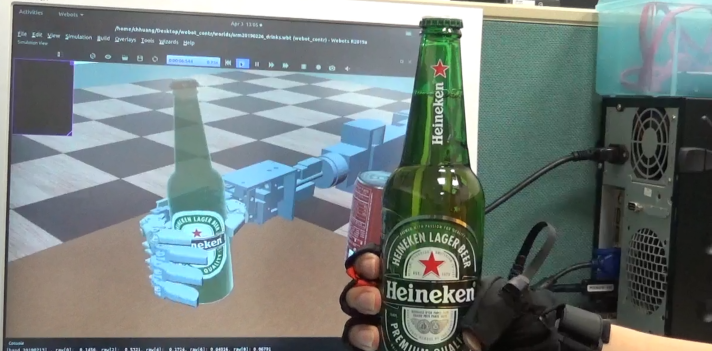
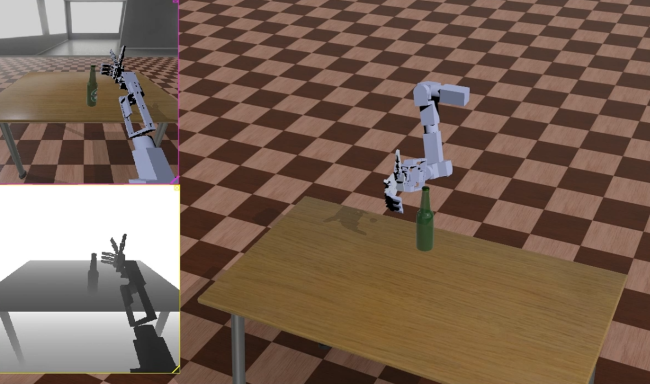
| 技術簡介 | 本開發平台針對未來服務型機械手臂具高自由度、即時回饋、快速調適、多樣性任務等特性,提供一由應用到晶片的完整開發流程,由擷取人類示範動作開始,引導虛擬環境中機械手臂進行高擬真學習,產出之模型針對AI加速晶片進行軟硬體整合設計與優化。本平台利用人類技能移轉,可大幅簡少機械手臂控制晶片與應用的開發複雜度。 |
||
| 科學突破性 | 本平台涵蓋由應用到晶片設計的完整開發流程,可大幅降低機械手臂控制與應用的開發複雜度,像這樣的平台技術門檻高,目前還不多見。其中涉及不同工具之間的介接、專家示範動作的擷取、虛實機械手臂的連結、高擬真度與高物理特徵之模擬系統、軟硬體整合設計與實現、以及高可擴展性與可插拔模組等技術。 |
||
| 產業應用性 | 本平台提供一由應用至AI加速晶片的完整開發流程。利用人類示範取代程式撰寫,預期可大幅減少未來服務型機器人應用開發的複雜度與成本,能以更低的成本、更容易的開發出更複雜的機器人。此外能移轉專家技能的機械手臂,未來可提供知名專家技能下載的服務,相信可形成一種新的機器人服務商業模式。 |
||
| 關鍵字 | 機械手臂控制 深度學習 人工智慧加速晶片 虛擬訓練 技能轉移 人類動作擷取 人工智慧編譯器 加速器架構設計 設計參數探索 模型優化 | ||
| 備註 | 此技術為總計畫、子計畫二、子計畫三、子計畫四、子計畫五共同合作 |
||
- 聯絡人
- 吳佳蓉
- 電子信箱
- jungwu@cs.nthu.edu.tw
其他人也看了