



| 技術名稱 | 具人工智慧物件辨識與自動導航之水下無人載具 | ||
|---|---|---|---|
| 計畫單位 | 國立中山大學 | ||
| 計畫主持人 | 王朝欽 | ||
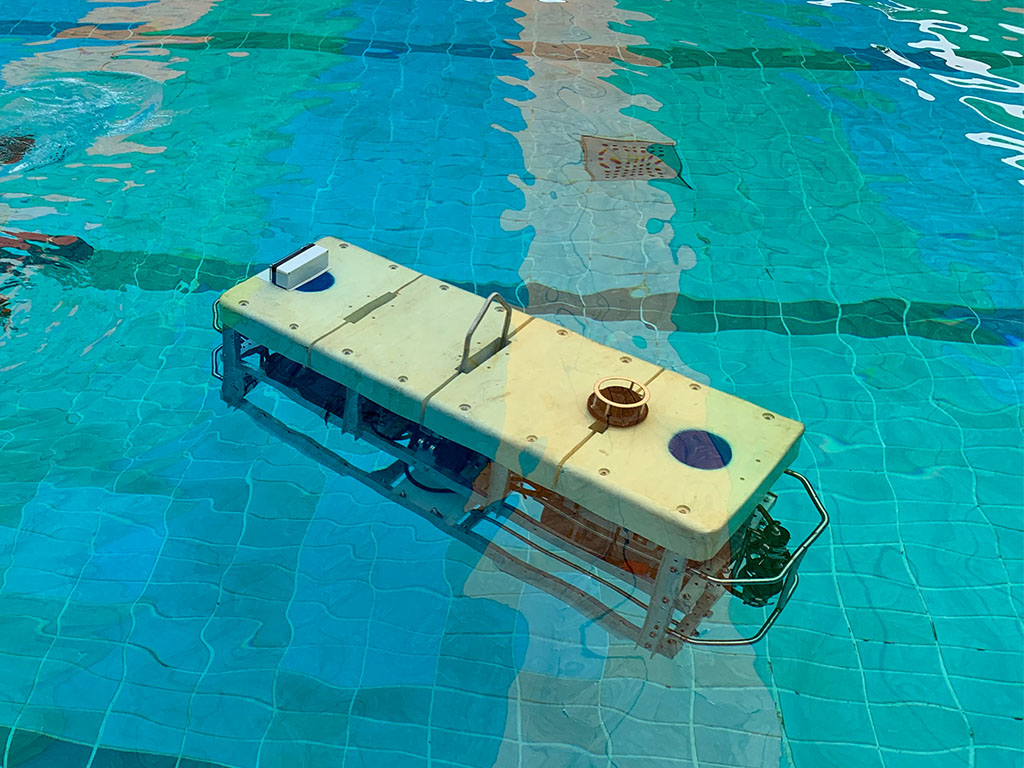
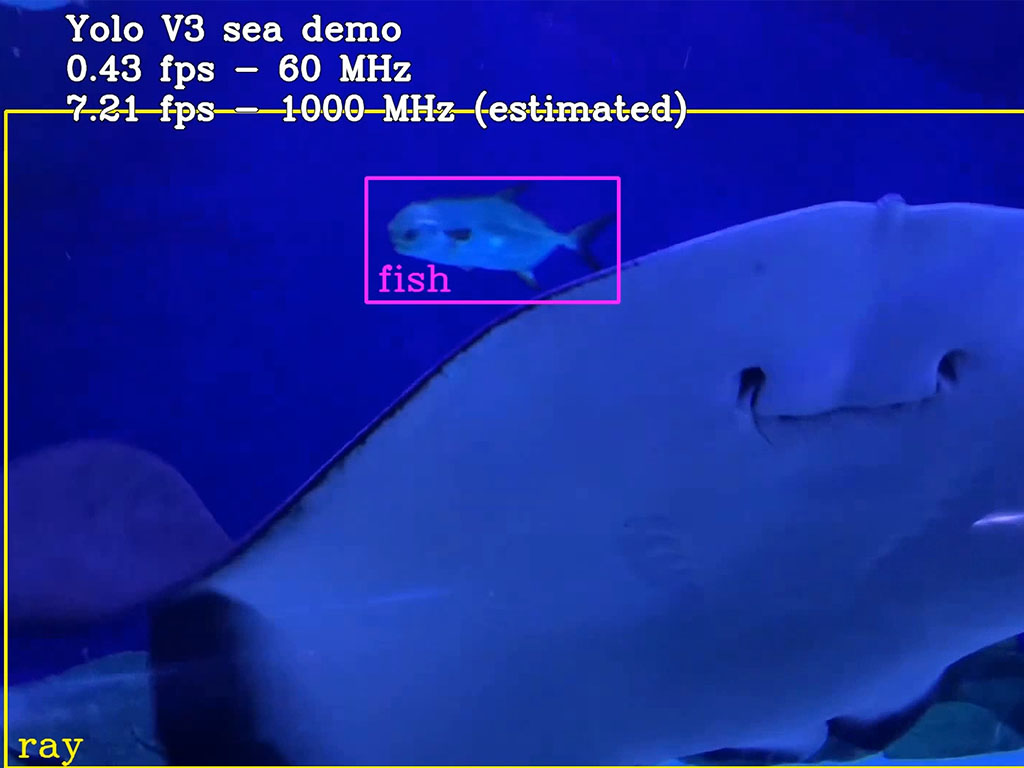
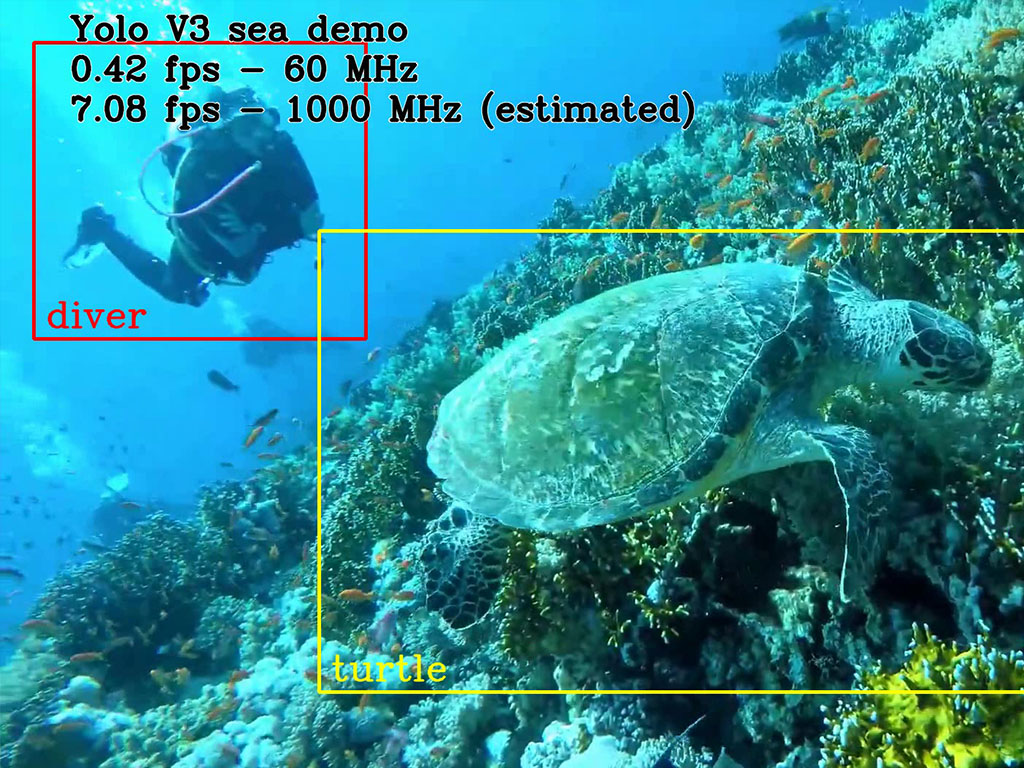
| 技術簡介 | 本技術為自行研製海洋中自主航行與作業之水下無人載具,未來可以衍生水下環境探勘、救援、資源搜集與生物紀錄等工作的開展。本技術研製之水下無人載具(autonomous underwater vehicle, AUV),除了配備慣性量測單元(IMU)、都卜勒測速儀(DVL)、下視高度計(Downward-looking altimeter)、前視高度計(Forward-looking Altimeter)、超短基線定位系統(USBL)等酬載外,主要技術突破是以AI技術與深度學習(CNN, DNN),可在海洋水下惡劣且光線不佳之環境中,具有水下物件高辨識正確率與可靠定位的能力。更且,本技術同時解決了水下無人載具之有限電池電力與空間條件下,將需要龐大的運算資源之AI演算與資料庫,實現在嵌入式系統,且在實際水域中運行實驗。為解決運算量過於龐大的問題,本案導入並重新設計Inception模組於物件偵測網路,以平行化的多尺度特徵提取強化網路的特徵提取效率,在小幅影響物件偵測準確度的原則下,最大限度地降低網路的大小,避免不必要的運算資源浪費。本案同時包括水下物件資料庫建立演算法,以3D建模與影像處理方法大量生成水下物件影像,以解決訓練資料不足之困境。本案所提出之方法能於單精度浮點運算力僅24 GFLOPS之樹莓派3上以10fps之速度運行,並達到83.64%之物件偵測準確度,可應用在水下物件辨識與航行定位。而國際標竿tiny-YOLO雖具89.81%之準確度,卻無法於樹莓派上運行,也無法應用到需要即時操作與電力有限之水下無人載具。 |
||
| 科學突破性 | 1.水下物件偵測技術可同時辨識5種生物,正確率達82.05% |
||
| 產業應用性 | 資源探勘:海底生態、生物與污染調查、水下養殖採收與觀察、海底資源與礦物探勘、水下考古調查、海底地形重建 |
||
| 關鍵字 | 無人水下載具 人工智慧 3D建模 水下影像強化 水下影像除霧 水下定位與避障 水下物件辨識 水下物件追蹤 電池系統監控 高效率電能轉換 | ||
| 備註 | 射月計畫 |
||
- 聯絡人
- 黃嘉億
- 電子信箱
- jia_yi_huang@g-mail.nsysu.edu.tw
其他人也看了