| Summary |
This study develops a smart self - propelled outdoor robot system.
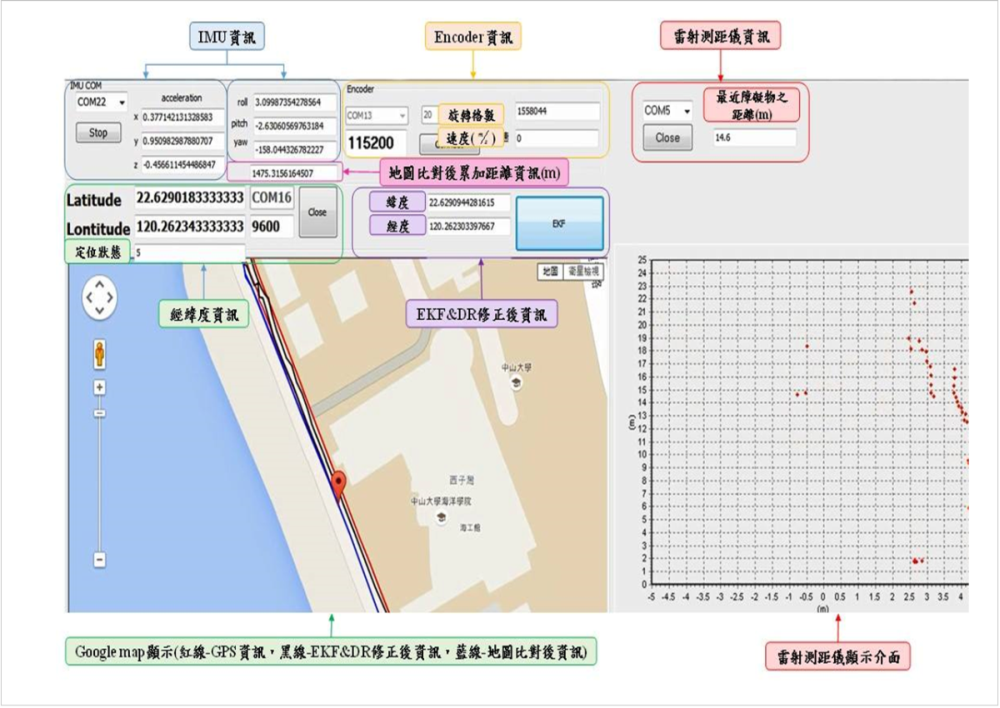
First, a six-wheeled platform robot is constructed. The main design concept is to increase the adaptability and have a greater maneuver in rugged terrain. The six-wheeled robotics platform is equipped some sensors: high resolution optical-encoder sensors, a global positioning system (GPS) sensor, a high definition (HD) webcam, and a light detection and ranging (LiDAR) sensor. The above sensors are used to detect the information of the environment awareness. The robot is localized by using self-locating technique from the encoders and LiDAR.
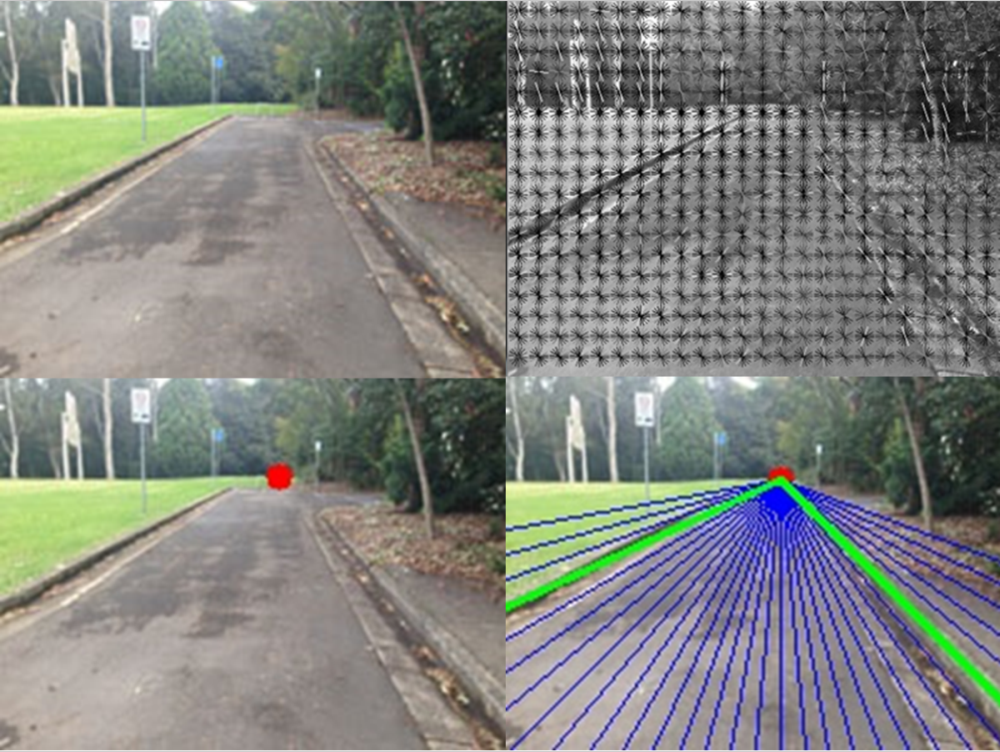
Besides, a multi-sensor based smart living environmental sensing and control system is established. A Wi-Fi based remote monitor system is used. The remote monitor system captures the environment by using a webcam. According to the image processing in the industrial computing platform, the proposed method can detect the lanes both on structured and unstructured roads.
Furthermore, a smart user interface of the remote monitor system is designed. The user interface provides multi-functions as follows: simultaneous localization and mapping (SLAM), lane detection in structured and unstructured roads, and a smart remote monitor system. |