




| 技術名稱 | 戶外型自走機器人設計應用 | ||
|---|---|---|---|
| 計畫單位 | 國立中山大學 | ||
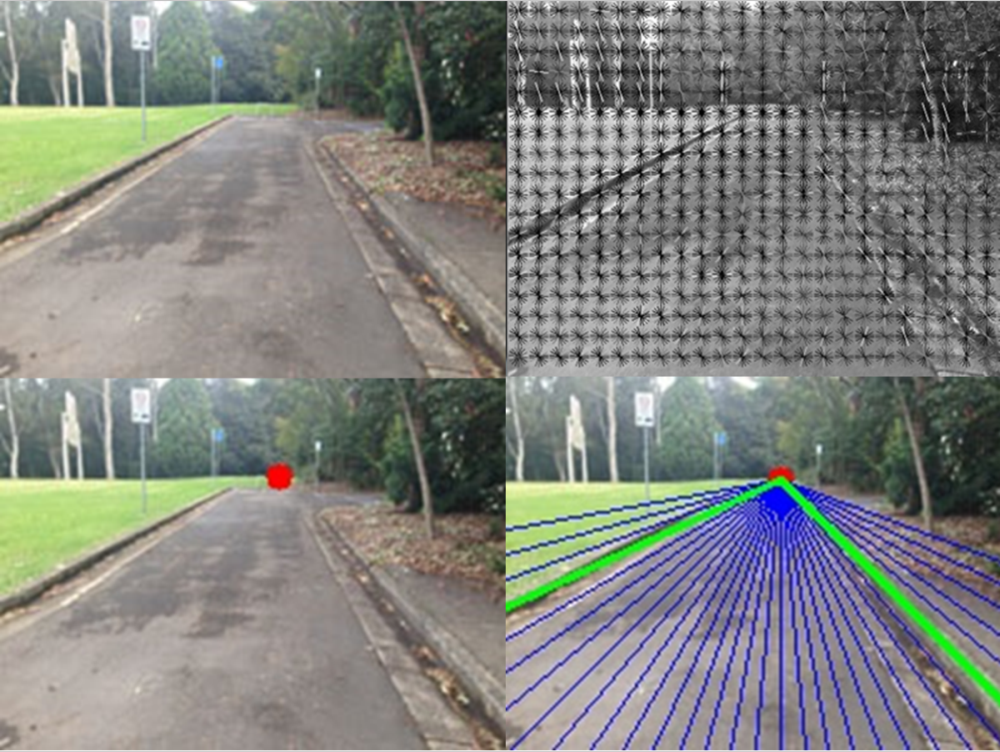
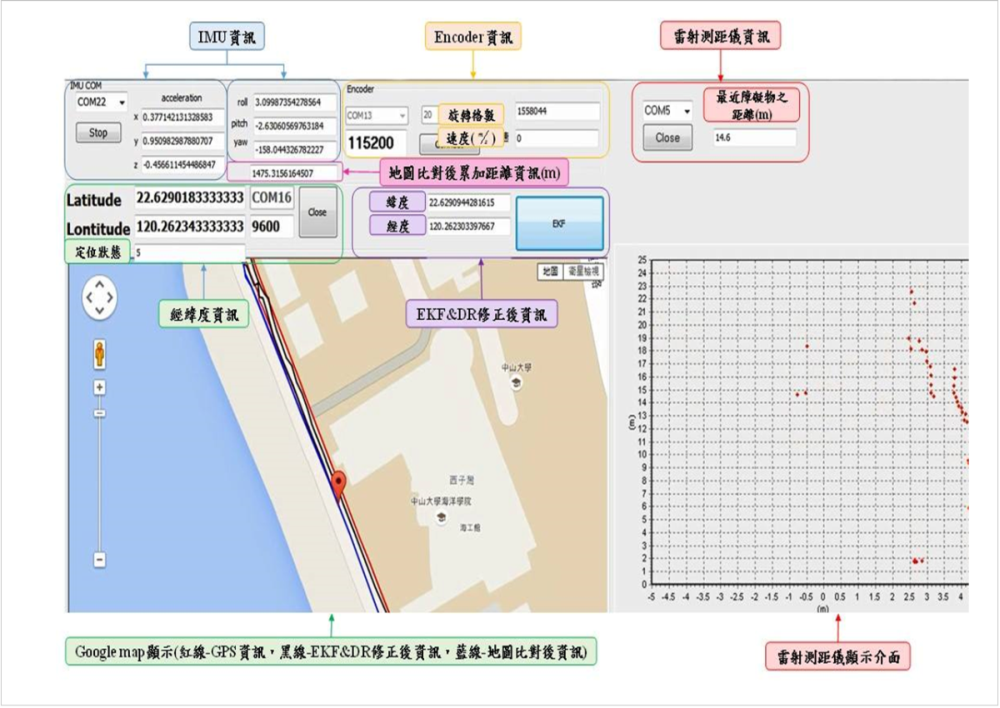
| 技術簡介 | 以自行設計之六輪式機器人為平台,用此六輪式結構來設計與製作一部送貨機器人,主要設計構思是增加在表面凹凸不平地形的適應性,並在最大限度的崎嶇地形有較大機動性。在機器人上方安裝GPS系統進行定位控制,整合網路攝影機與雷射感知器進行環境感知和結構與非結構的道路偵測,並且利用Wi-Fi將網路攝影機所拍攝的環境影像傳回遠端畫面進行監控。資料處理及運算平台則採用工業電腦。藉由自行開發之演算法,並整合各感測器之資訊完成一部具送貨功能之機器人。 |
||
| 科學突破性 | 該研究具有自動定位與導航功能,以及影像技術做輔助,該技術可用於工業自動化及智慧家庭。 |
||
| 產業應用性 | 近年政府及產業界皆提出工業4.0需求,該研究成果技術具有高發展潛力。 |
||
其他人也看了