



| 技術名稱 | 控制橋梁變形之臨界平衡裝置及其方法 | ||
|---|---|---|---|
| 計畫單位 | 國立暨南國際大學 | ||
| 計畫主持人 | 施明祥 | ||
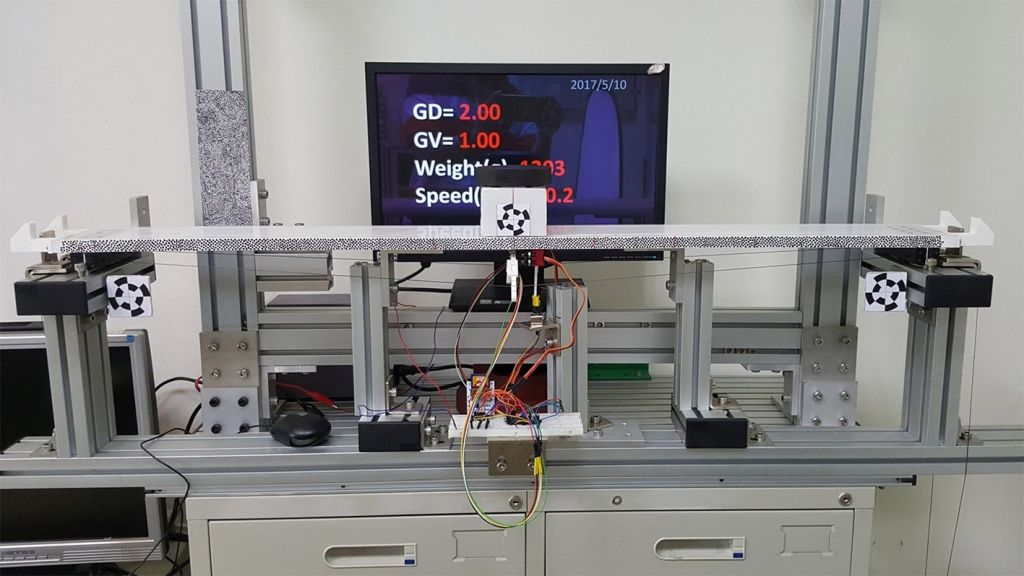
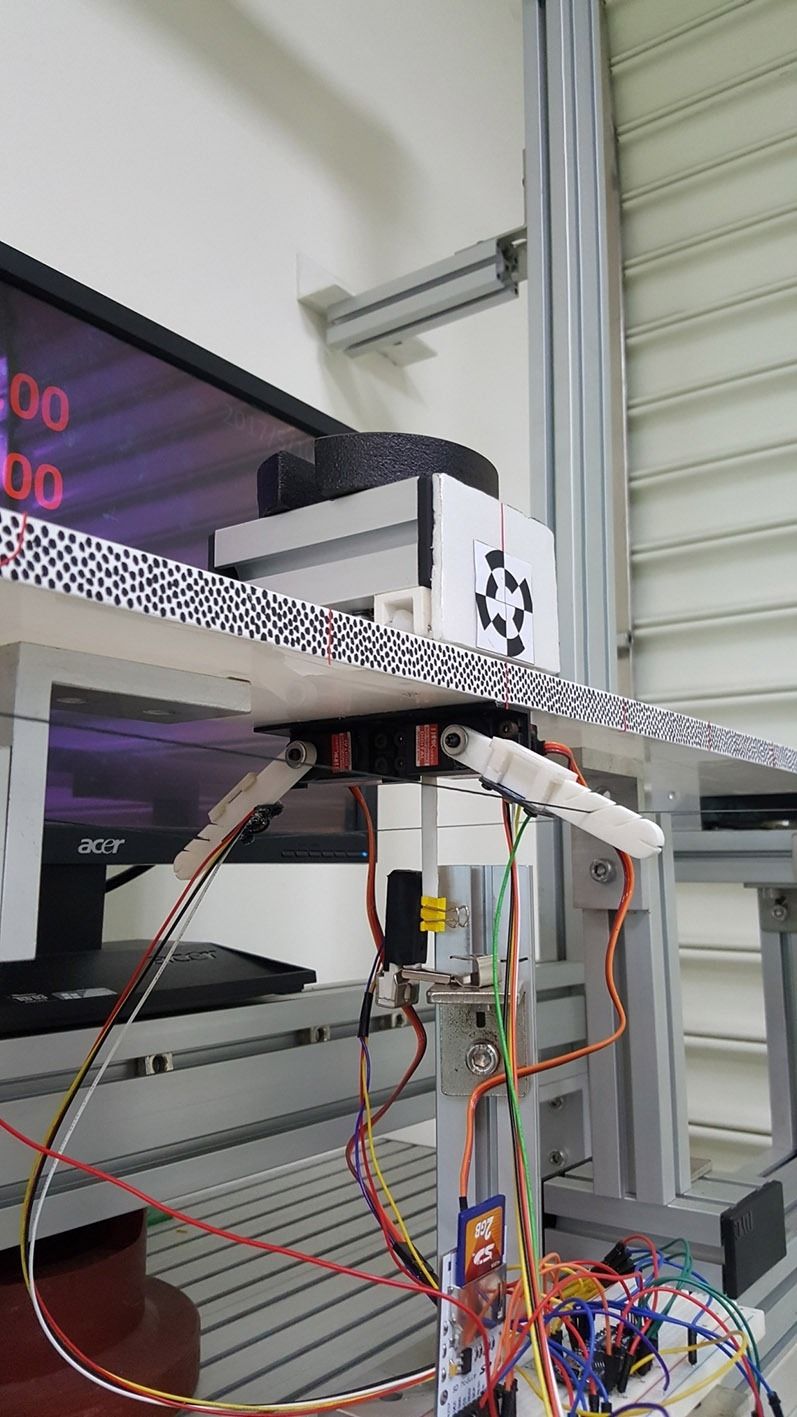
| 技術簡介 | 機構設置於橋樑本體,具1.迴旋機構於橋樑本體之底面,2.兩設置於基座之旋臂;3.兩纜索穿設於旋臂之一端;4.固定纜索兩端的錨定座;5.電子控制模組於兩旋臂另一端伺服馬達;6.電性連接伺服馬達控制器;7.電性連接控制器位移感測器;藉由迴旋機構產生向上的控制力,抵銷橋樑本體向下的力量,避免橋樑本體變形。 |
||
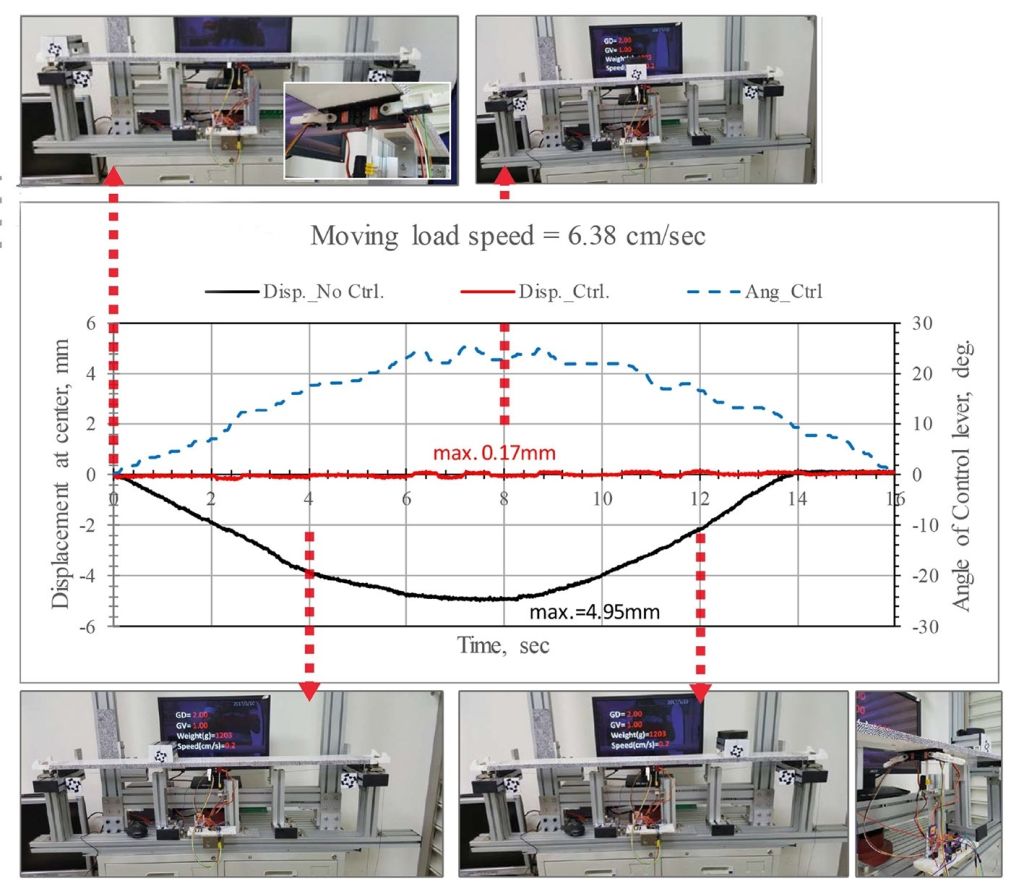
| 科學突破性 | 本發明可以根據移動載荷的位置來平衡此載荷,由 RC伺服器控制懸臂旋轉的旋轉角度可以轉至適當的角度, 以提供足夠的向上合力;無論橋梁移動載重的位置為何,本發明控制機構可以將橋樑的最大垂直位移控制在設計標準,橋樑跨度的1/400以下。突破工地環境、施工限制以及提高現有橋樑的承載力,可降低橋樑的斷面深度。 |
||
| 產業應用性 | 為因應各種施工環境的挑戰,本發明突破環境的限制,材料輕量可以適用於土木與建築工程,搭配FRP產業生產輕量橋體、景觀橋梁設計與施工、緊急救災橋梁等,改良以後亦可發展是用於工具機產業之技術,以降低震顫的影響穩定機台提高生產力。本發明運用對象為:緊急橋梁、國軍野外戰鬥橋梁、人行陸橋、景觀橋梁及工具機台等。 |
||
| 關鍵字 | 臨界平衡控制 虛擬橋墩 向上合力 RC 控制器 輕量材料 旋轉懸臂機構 救災橋梁 景觀橋梁 智慧控制 工具機 | ||
- 聯絡人
- 施明祥
- 電子信箱
- iloveaachen@gmail.com
其他人也看了