



| Technical Name | Device-free Person Detection and Passive Localization using Autonomous Unmanned Aerial Vehicle | ||
|---|---|---|---|
| Project Operator | National Central University | ||
| Project Host | 陳昱嘉 | ||
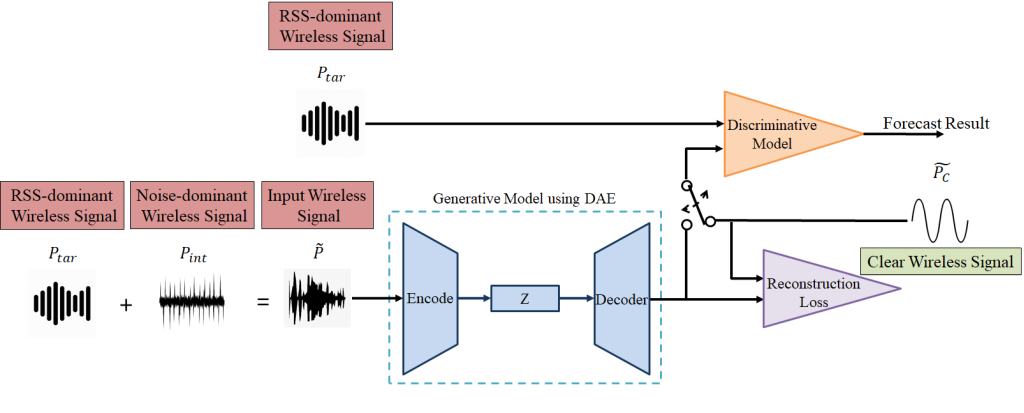
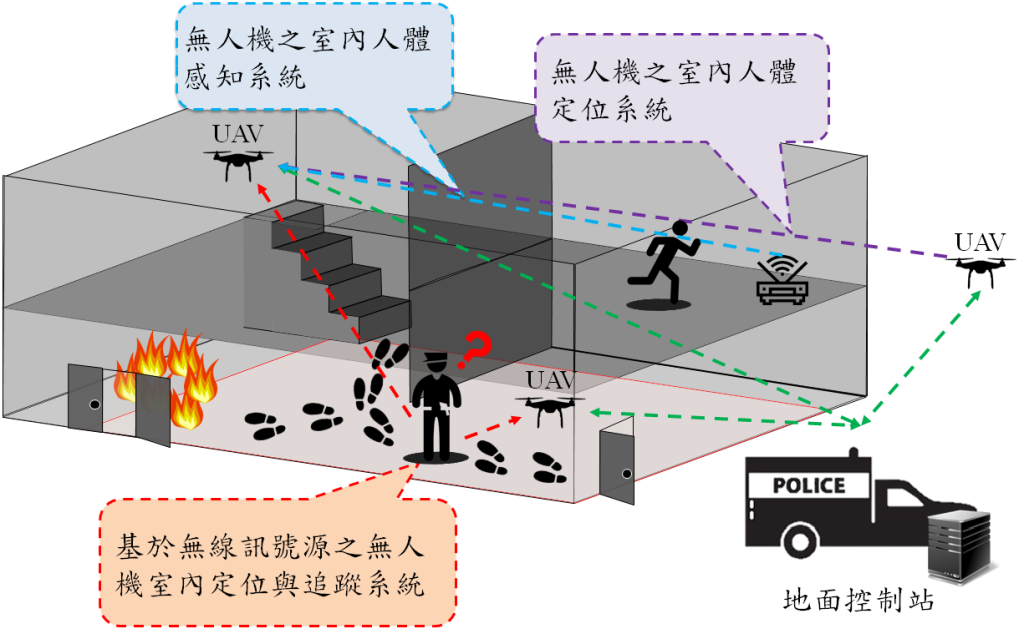
| Summary | The developed system uses deep learning to filter the UAV auto-vibration signal. We measure the ground-truth signal and the real-world noisy signal from a fixed receiver and receiver on the UAV to learn the model. Then we combine deep learning-based UAV trajectory design and signal processing techniques for indoor radio map generation. We can recognize the signal characteristics generated by people activities from the radio map to achieve accurate people localization. |
||
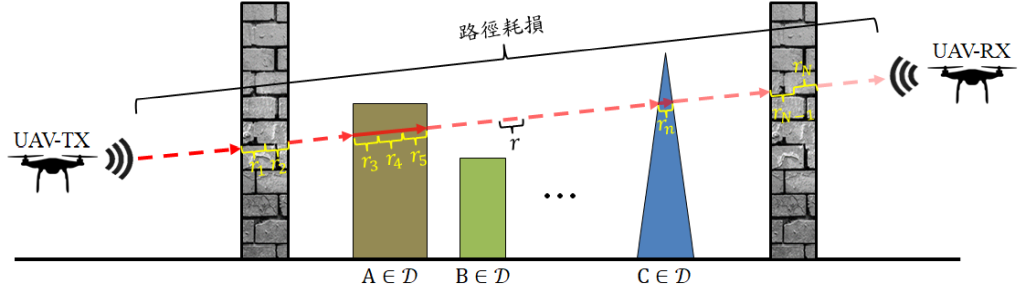
| Scientific Breakthrough | We extend the existing 2D through-wall wireless sensing to 3D through-wall aerial sensing. To deal with the instability of UAV platforms, we exploit deep learning based denoising technique to improve detection robustness and effectiveness. We envision to develop an efficient and reliable collaborative aerial robot to achieve the vision of smart disaster rescue and smart security. |
||
| Industrial Applicability | In the long-term goals of the project, we hope to design efficient and reliable flying robots for mission-critical applications. Through the human-robot collaboration, we can achieve the vision of smart disaster relief and smart security. It is expected to bring new business opportunities to UAV and IT industries, and promote the intelligent upgrade of professional and commercial UAV, leading to a competitive Taiwan industry. |
||
| Keyword | UAV Wireless sensing Human-robot collaboration Person detection Passive localization IoT High-reliability transmission Localization and tracking Smart city Smart disaster relief | ||
- wl01420395@gmail.com
other people also saw