



| 技術名稱 | 網宇實體感測(CPS)3D立體建模應用於果樹生長監控 | ||
|---|---|---|---|
| 計畫單位 | 國立交通大學 | ||
| 計畫主持人 | 歐陽盟 | ||
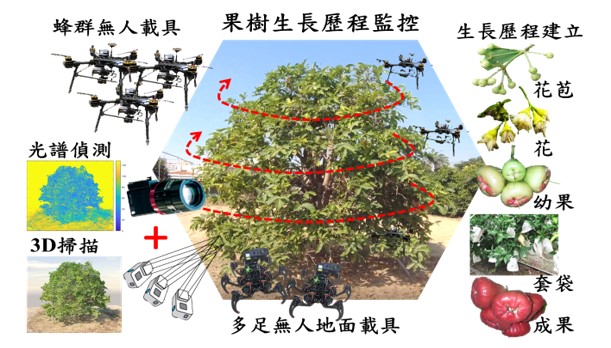
| 技術簡介 | 核心技術包含輕量化蜂群無人載具、異質感測器整合、避障、群飛自動飛行控制、RTK精密定位系統與果樹之3D立體建模技術。蜂群無人機可搭載高解析可見光相機與快照式多光譜感測器進行3D掃描與光譜資訊蒐集,透過融合3D影像、多光譜影像進行果樹生長歷程監控,更可對果樹部位辨識、營養分析、產量預估與果品品質監測。 |
||
| 科學突破性 | 本計畫能同時觀察多顆果樹與單果樹細部之營養成分與成長歷程,使用空中三角測量法與3D立體視覺法相輔助提高3D建模精密度、並且有RTK定位系統精準定位,能自動收集多棵果樹之3D立體建模資訊收集,擁有自動化監控優勢,同時收集可見光與多光譜資訊,以非侵入式方式提供果樹成長歷程之各方面研究分析。 |
||
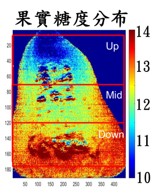
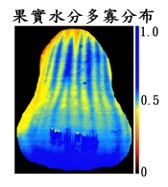
| 產業應用性 | 目前果樹的栽培技術研究大多需以人工方式進行,較無完整的果樹生長研究量化系統。本計畫希望能夠建立網宇實體感測(CPS)3D系統應用於果樹生長監控,進行長時間3D建模與光譜偵測,提供果樹生長歷程監控服務。目前可以利用此技術建立3D果樹生長歷程,並用光譜分辨果實甜度、水分進行篩選分級,具產業的效益之雛形。 |
||
| 關鍵字 | 3D立體量測無人飛行載具 快照式多光譜無人飛行載具 非侵入式光譜偵測 輕量化RTK精密定位系統 3D立體建模 3D模型異質整合 蓮霧 品種 水分 糖度 | ||
- 聯絡人
- 顏永哲
- 電子信箱
- yanjohn888@gmail.com
其他人也看了