



| Technical Name | Self-Supervised Learning of DepthCamera Motion from 360◦ Videos | ||
|---|---|---|---|
| Project Operator | National Tsing Hua University | ||
| Project Host | 孫民 | ||
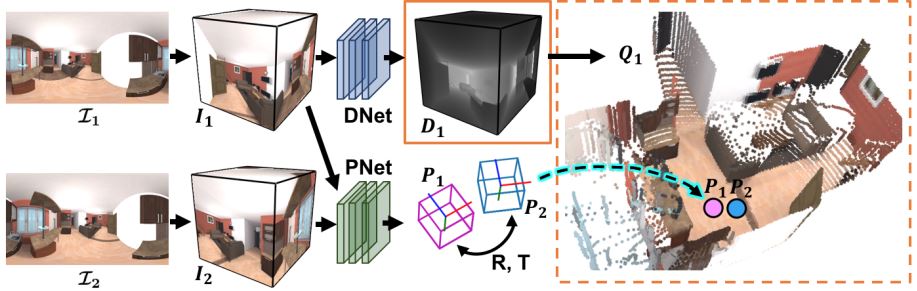
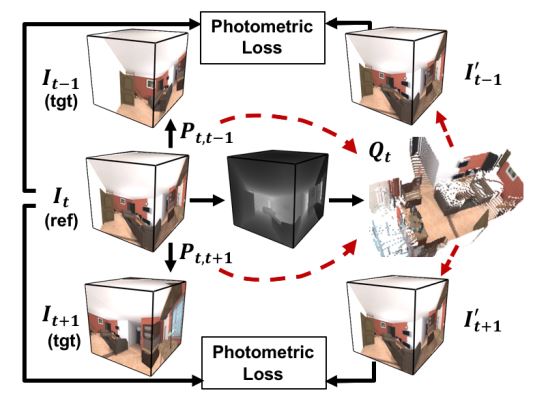
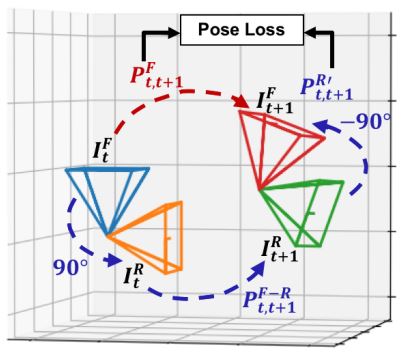
| Summary | We proposed a self-supervised learning approach predicting depthcamera motion from a 360 video. We convert images from an equirectangular to cubic projection to avoid distortion. We propose "spherical" photometric consistency. Hence, no pixel will be projected outside the image boundary. Finally, we propose camera pose consistency to ensure the estimated camera motions reaching consensus. |
||
| Scientific Breakthrough | To the best of our knowledge, predicting depth from a monocular 360 camera has not been well studied. We proposed a novel self-supervised learning approach for predicting the omnidirectional depthcamera motion from a 360 video. We introduce three key features to process 360 images efficiently |
||
| Industrial Applicability | All autonomous systems, including self-driving cars, robots, need to perceive the surrounding to act in the world safely. However, this introduces extra costtechnical challenge to maintain a stablewell calibrated multiple camera system. In this case, modern 360◦ cameras are a great alternative since they are well-calibrated, low-cost. |
||
| Keyword | __ | ||
- futuretech.most@gmail.com
other people also saw