:::
- 首頁
- /
- 年度
- /
- 2018
- /
- AI智慧應用&電子&光電
- /
- 基於自我督導式學習預測360影片之深度與相機運動




| 技術名稱 | 基於自我督導式學習預測360影片之深度與相機運動 | ||
|---|---|---|---|
| 計畫單位 | 國立清華大學 | ||
| 計畫主持人 | 孫民 | ||
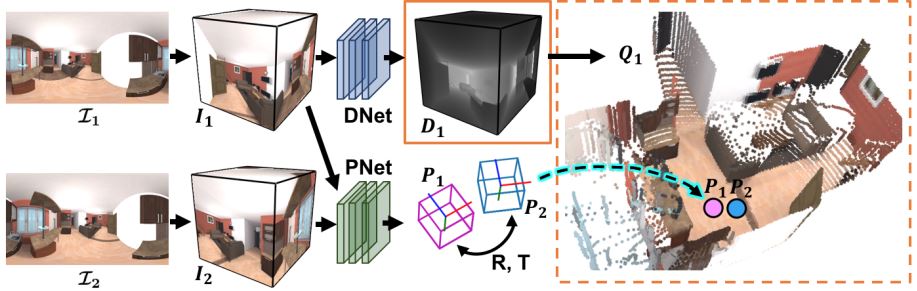
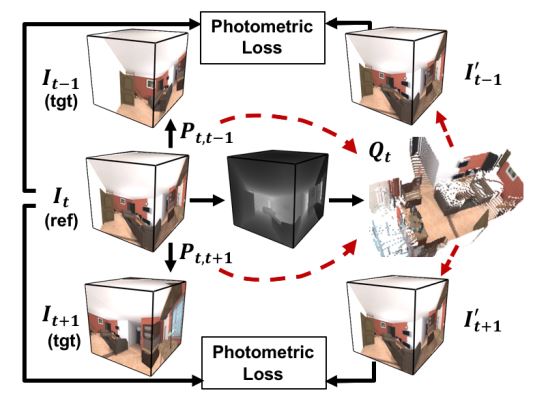
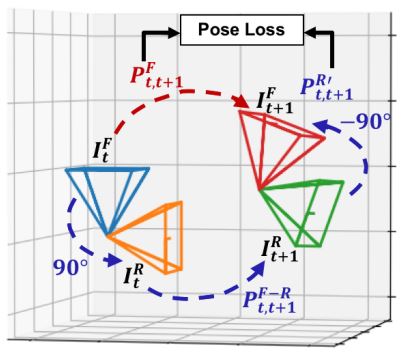
| 技術簡介 | 我們利用自我監督式學習的方法來預估360影片中全向式的深度與相機運動。首先,將等距離長方圓柱投影到立方體以避免過多的影像扭曲。接著,我們提出一個創新的球狀光度一致性限制360度球體成像,用球狀投影可以將所有像素投射回影像平面。最後,我們提出相機姿態一致性的損失函數使預測的相機運動能達到一致性。 |
||
| 科學突破性 | 目前單幀影像預測深度之技術尚未完整應用於全景影像。我們提出基於360度影片的深度預測技術,並且於整體架構中提出三點新穎的技術加強深度與相機動作的預測。 |
||
| 產業應用性 | 無論是在自動駕駛車、機器人或是智慧系統上,了解周遭的環境變化與自身位置是不可或缺的。傳統方法使用多鏡頭系統等儀器,維護成本高且須高度整合。現在透過一個360相機鏡頭,搭配演算法即可預測深度與行進路徑,價格相對低廉且易取得使用。 |
||
| 關鍵字 | |||
- 聯絡人
- 王福恩
- 電子信箱
- futuretech.most@gmail.com
其他人也看了