





| 技術名稱 | 旋翼無人機精準定位盤旋及定點降落 | ||
|---|---|---|---|
| 計畫單位 | 國立政治大學資訊科學系 | ||
| 計畫主持人 | 劉吉軒 | ||
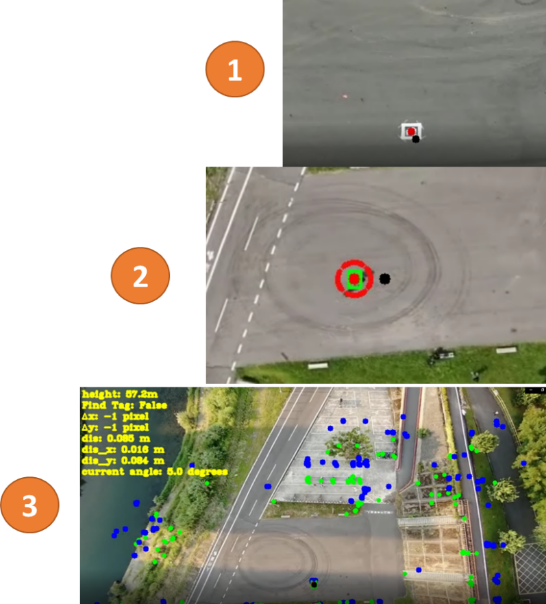
| 技術簡介 | 本技術提供旋翼無人機於任務飛行高度精準定位盤旋及定點降落所需的自主控制能力。本技術結合視覺辨識與導航控制,可從標示定點起飛,垂直升空至所需任務高度,持續精準懸停於定點正上方,至任務結束,再精準降落於標示定點。本技術亦可用於持續以影像鎖定目標物,可跟隨目標物移動,持續保持於目標物正上方之懸停與監視。 |
||
| 科學突破性 | 本技術以不用GPS訊號的自我定位方式,只需旋翼機搭載單鏡頭相機,提供遠距精準定位及目標物件影像鎖定能力,同時結合導航控制能力,達成任務所需飛行位置的精準動態調校。本技術於多模定位、自動切換、遠距可變、全自主性、上層導航、落地驗證等面向皆展現具體突破,在100m的飛行高度僅產生約0.31m的偏移誤差。 |
||
| 產業應用性 | 本技術之產業應用面包括長時間滯空的空中通信基地台、地面影像採集及土地量測、對特定目標進行追蹤觀測與紀錄、智慧物流遞送點之精準安全降落等應用。本技術亦可結合地理位置資訊的取得,提供目標所在的精確地理座標資訊,延伸出更高的任務價值。另外,本技術亦具備平時民用、戰時軍用的平戰結合應用優勢。 |
||
| 關鍵字 | 無人機 空中精準定位 可變距定位 精準降落 自動導航控制 多模定位切換機制 圖案標籤定位 物件跟蹤定位 影像特徵定位 地理參考 | ||
- 聯絡人
- 李恭儀
- 電子信箱
- james88385542@gmail.com
其他人也看了