



| 技術名稱 | 三維資訊為基礎之偽標籤方法實現領域自適應深度估測技術 | ||
|---|---|---|---|
| 計畫單位 | 國立陽明交通大學 | ||
| 計畫主持人 | 彭文孝 | ||
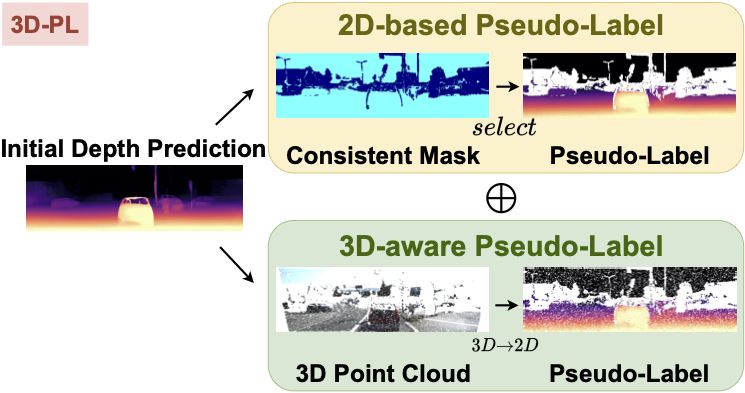
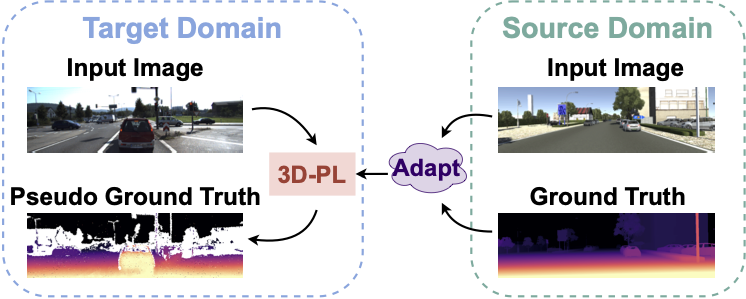
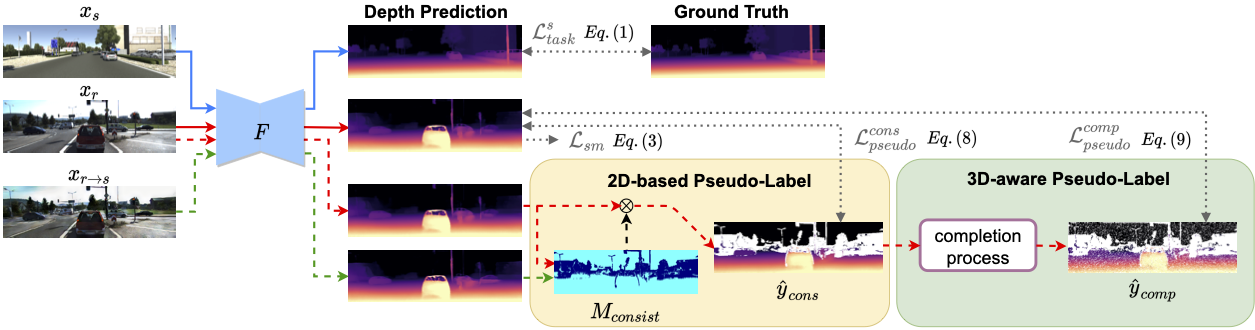
| 技術簡介 | 我們利用具有詳盡標註且精度極高之虛擬場景數據中所學習到深度估測能力,來輔助不具監督式數據的真實場景之深度估測模型學習。為了處理真實及虛擬場景之間數據分布的差異,我們研發以"虛擬標註"為核心的學習架構,結合"基於二維影像上預測一致性"和"基於三維空間結 |
||
| 科學突破性 | 我們提出兩種具有科學創新和突破性的虛擬標註技法,來達成在深度估測任務上最佳的適應學習成效。其包含了1)使用風格轉換技巧於兩張真實圖片上計算深度估測一致性以取得之二維虛擬標註、及2)利用相機投影將二維圖片和初步深度估測結果投影出三維點雲後,進一步進行三維點雲填補而取得之富有三維結構資訊的三維虛擬標註。 |
||
| 產業應用性 | 由於深度資訊能夠提供豐富的三維結構和空間幾何特性,其是許多電腦視覺應用裡不可或缺的重要元素,例如自動駕駛車、機器人、智慧製造、虛擬或增益實境等。因此,如果在毋需大量人為標註訓練數據的條件下,就能夠學習到從單張圖片中獲取深度資訊之能力的話,將會對於運用到視覺感測技術的所有相關產業都具有極大的正面效益。 |
||
| 關鍵字 | 深度估測 適應學習 虛擬標註方法 | ||
- 聯絡人
- 邱維辰
- 電子信箱
- walon@cs.nctu.edu.tw
其他人也看了