



| 技術名稱 | 自駕定位導航引擎設計:慣性導航/全球衛星定位/光達同步定位與製圖整合演算法與完整性分析 | ||
|---|---|---|---|
| 計畫單位 | 國立成功大學 | ||
| 計畫主持人 | 江凱偉 | ||
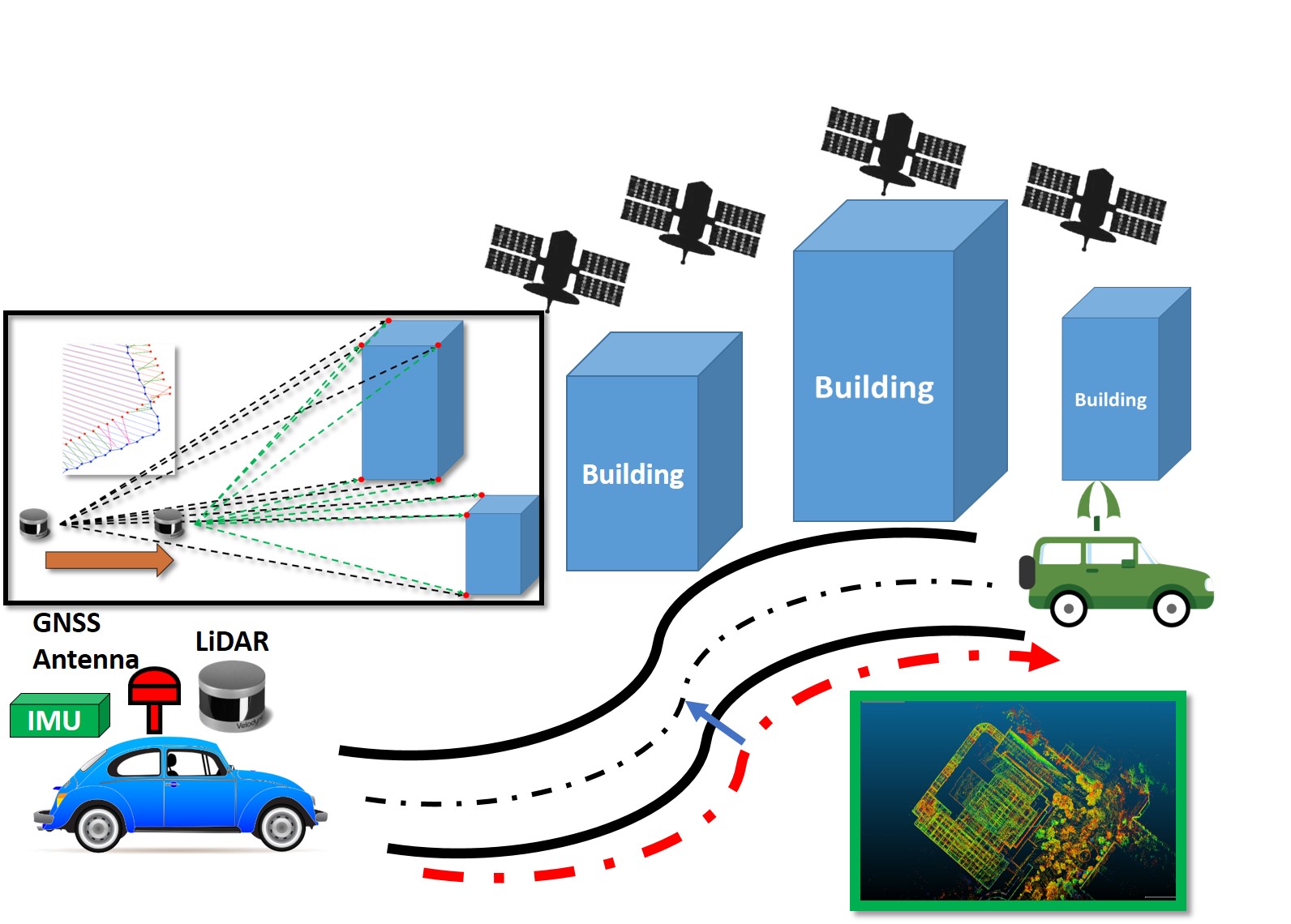
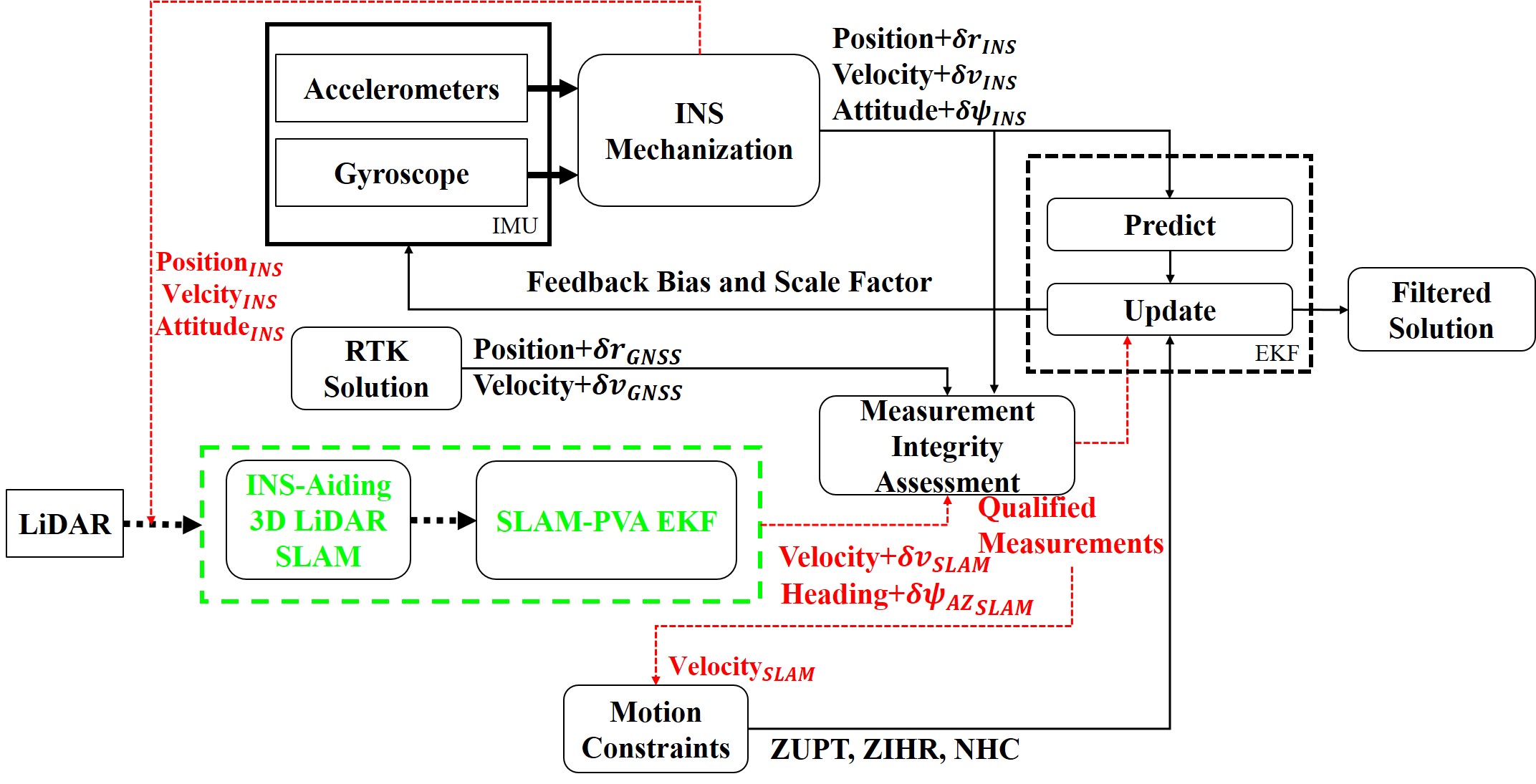
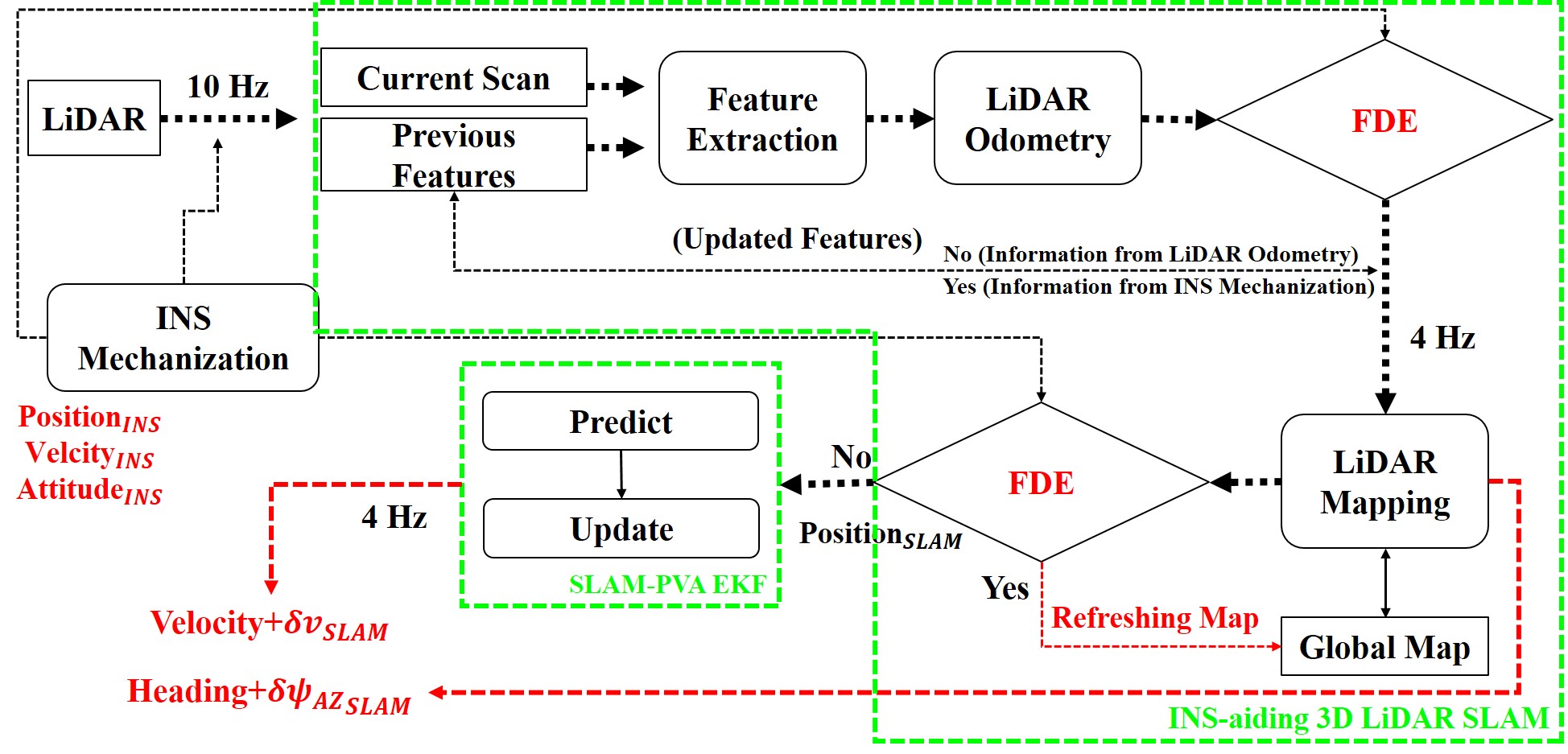
| 技術簡介 | 本技術提出利用多感測器整合的方式,加入光達即時定位與地圖構建技術,發展慣性導航/全球衛星定位系統/光達即時定位與地圖構建技術之整合演算法,並建立觀測量更新機制,解決衛星定位訊號嚴峻導致導航成果不佳的問題,也藉由本研究發展的適應性刷新-即時定位與地圖構建技術解決傳統即時定位與地圖構建誤差漂移的問題,通過整合光達即時定位與地圖構建擴展了常規慣性導航/全球衛星定位系統鬆耦合架構。實施輔助策略以處理即時定位與地圖構建漂移和發散問題。值得一提的是,整合方案使用不同的度量進行完整性分析。此過程可確保在擴增式卡爾曼濾波器中應用測量更新之前,每次測量均合格。同時,合格的即時定位與地圖構建派生的速度測量結果還用於檢測車輛的運動,並應用適當的運動約束,例如非協和約制,零速更新和零整合航向率。以期符合自動駕駛技術導航精度之需求。本技術提出之完整資料處理整合演算法架構圖,此架構之上半部為傳統慣性導航/全球衛星定位系統鬆耦合整合架構,此架構的主要系統慣性導航會不斷輸入導航資訊於擴增式卡爾曼濾波器中,一旦全球衛星定位系統提供的位置與速度資訊是可用的,將會啟動更新程序調整整個系統的狀態與協變方。完整性分析中,本技術提出更新機制的目的在於能輔助其他觀測量,不僅能驗證不同觀測量的品質,也能考慮各感測器間的優勢,舉例來說,即時定位與地圖構建所導出的速度更穩定,因此能夠用於速度方面的應用。為了解決INS與即時定位與地圖構建誤差飄移的問題,利用全球衛星定位系統觀測量之無時變性的特性,能夠使整個導航系統受益,免於漂移的問題,並且能消除累積的誤差。本技術提出了一種半緊耦合的光達即時定位與地圖構建,利用慣性導航輔助,故障檢測和排除,即時定位與地圖構建-位置-速度加速度-模型和適應性刷新。即時定位與地圖構建-位置-速度加速度-模型的主要目的是估計中央整合濾波器的更精確速度,並且用高斯馬可夫模型來描述加速度的誤差行為。由於半緊耦合的光達即時定位與地圖構建致力於提供中央整合濾波器的可靠測量。如果從故障檢測和排除中檢測到光達即時定位與地圖構建的故障,則將從全局地圖中刪除所有先前的特徵,並根據慣性導航重新生成特徵。一方面,它可以提高即時定位與地圖構建的效率。另一方面,可以通過採用絕對解來重置累積的誤差,尤其是接收適當的全球衛星定位系統觀測量時。 |
||
| 科學突破性 | 本技術建立多元觀測量更新機制,解決不同場景之下導航成果不佳的問題,提出慣性導航/全球衛星定位系統/光達即時定位與地圖構建技術之整合演算法,發展半緊耦合的適應性刷新-即時定位與地圖構建技術解決傳統方法誤差漂移的問題,提出完整性分析確保在系統導航精確度。 |
||
| 產業應用性 | 本技術著重於改善導航精度議題,並致力於提升在不同環境下的導航成果,根據智能交通系統的導航精度需求,本技術之演算法於位置精度約落在0.5至1公尺間。達到Which Lane的導航精度等級,以低廉的且符合不同精度需求的高精度無縫式導航系統,提高國內在室內導航與自駕車相關產業及其應用的技術水平與推廣程度。 |
||
| 關鍵字 | 自駕車 智能交通系統 導航 慣性導航 全球衛星定位系統 光達 即時定位與地圖構建 多感測器整合 整合式定位系統 擴增式卡爾曼濾波器 | ||
- 聯絡人
- 蔡光哲
- 電子信箱
- tpp1114@gmail.com
其他人也看了