



| Technical Name | Design and Implementation of Service Robot and Its Pose Estimation and Grasping Point Learning Scheme | ||
|---|---|---|---|
| Project Operator | National Cheng Kung University | ||
| Project Host | 李祖聖 | ||
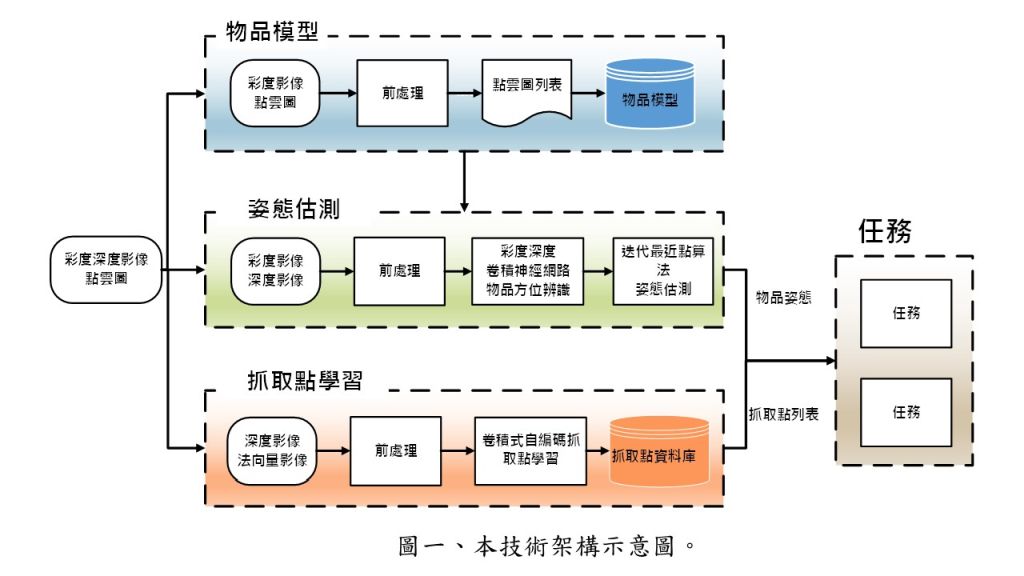
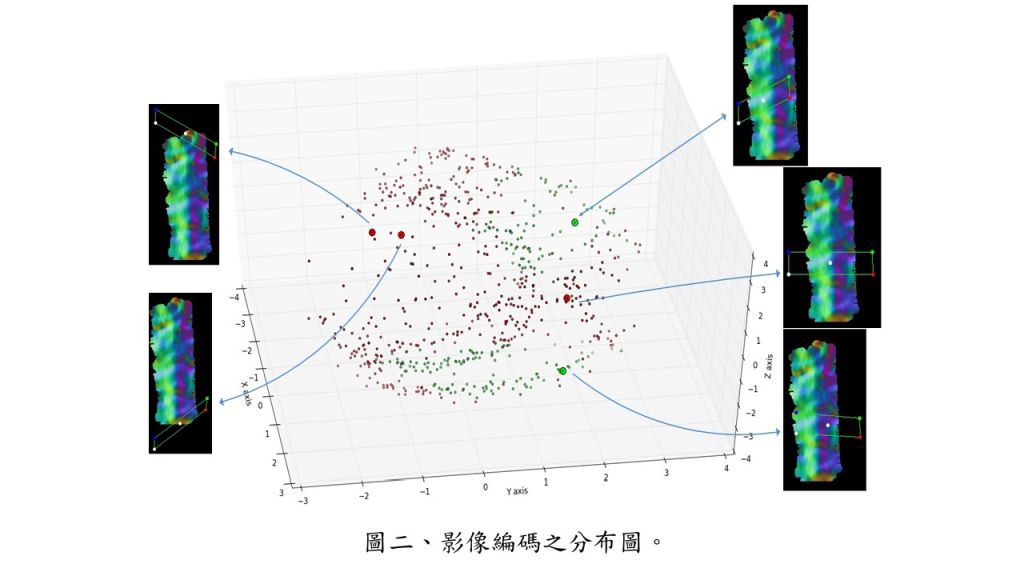
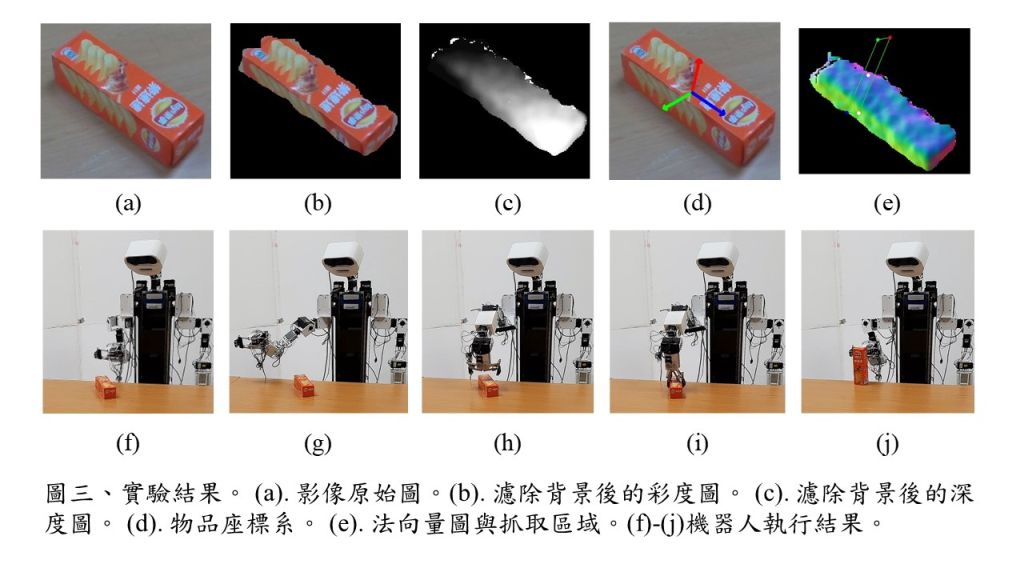
| Summary | This project designs and implements a novel service robot with 4WIS4WID capability and two 7 DoF arms, where an object pose estimation and a grasping point learning method are proposed. The pose of an object and its coordinate are constructed by RGBD-CN and the ICP algorithm. The grasping point is learned by the Convolutional Auto-encoder. The robot can plan a successful grasp based on tasks. |
||
| Scientific Breakthrough | Different form most researches which treat object pose estimation, grasping point learning, and execution tasks is a single topic, this technology consider them as one thing. Therefore, the robot manipulator can manipulate objects by the object coordinates and choose a suitable grasping point by the appointed task. It increase the feasibility of the manipulation. |
||
| Industrial Applicability | This technology contains an object pose estimation method and a grasping point learning network and integrates these two methods with tasks. This technology can be used on service robots and robot manipulators to enhance the manipulation ability for objects. Because, the object can be defined by its coordinates, its position need not be fixed. It saves processes and time when executing a task. |
||
| Keyword | Design and Implementation of Service robot Robot manipulator Object pose estimation Object model and coordinates RGBD Convolutional Neural Network(RGBD-CNN) Grasping point learning Iterative closest point algorithm (ICP) Convolutional Autoencoder (CAE) Object recognition Object grasping | ||
- wenyi@mail.ncku.edu.tw
other people also saw