




| Technical Name | Voice-Guided Robotic Picking by Interactive Object Referring and 3D Vision | ||
|---|---|---|---|
| Project Operator | National Taiwan University | ||
| Project Host | 徐宏民 | ||
| Summary | -The brand-new intelligent robotic technology to reduce deployment time and efforts |
||
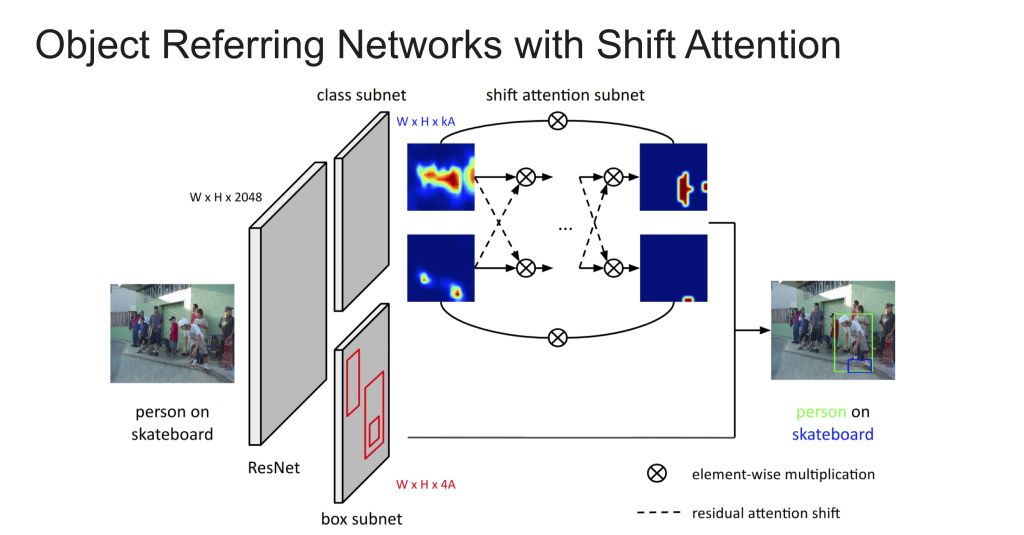
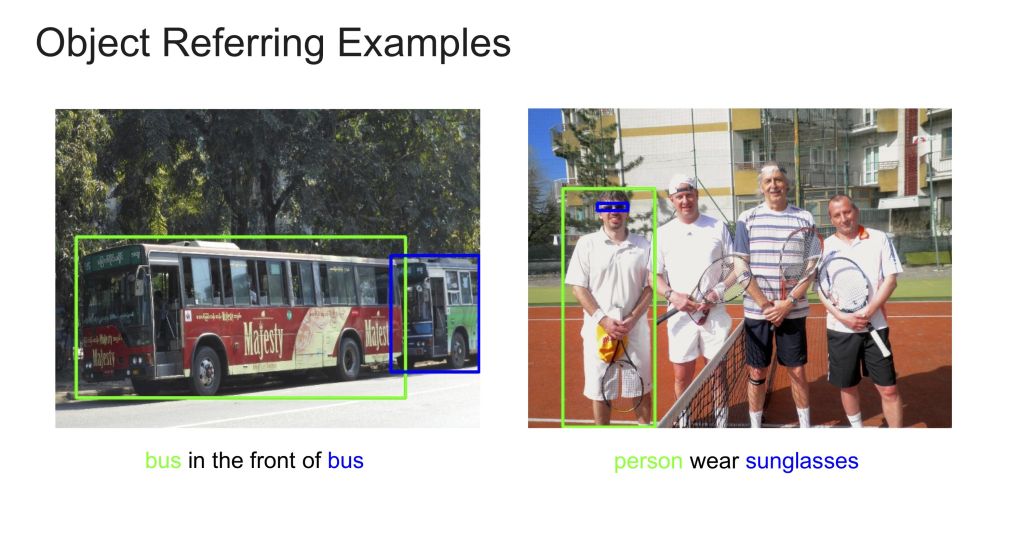
| Scientific Breakthrough | -Advancing machine comprehension for robotic arms with voice-guided object referring |
||
| Industrial Applicability | -The brand-new intelligent robotic technology to reduce deployment time and efforts in production lines |
||
| Keyword | robotic arms robot pick and grasp object referring industry 4.0 3D vision point cloud human robot interaction deep learning object detection | ||
- whsu@ntu.edu.tw
other people also saw