:::
- 首頁
- /
- 年度
- /
- 2018
- /
- AI智慧應用&電子&光電
- /
- 多地形上輪腳複合移動載台




| 技術名稱 | 多地形上輪腳複合移動載台 | ||
|---|---|---|---|
| 計畫單位 | 國立臺灣大學 | ||
| 計畫主持人 | 林沛群 | ||
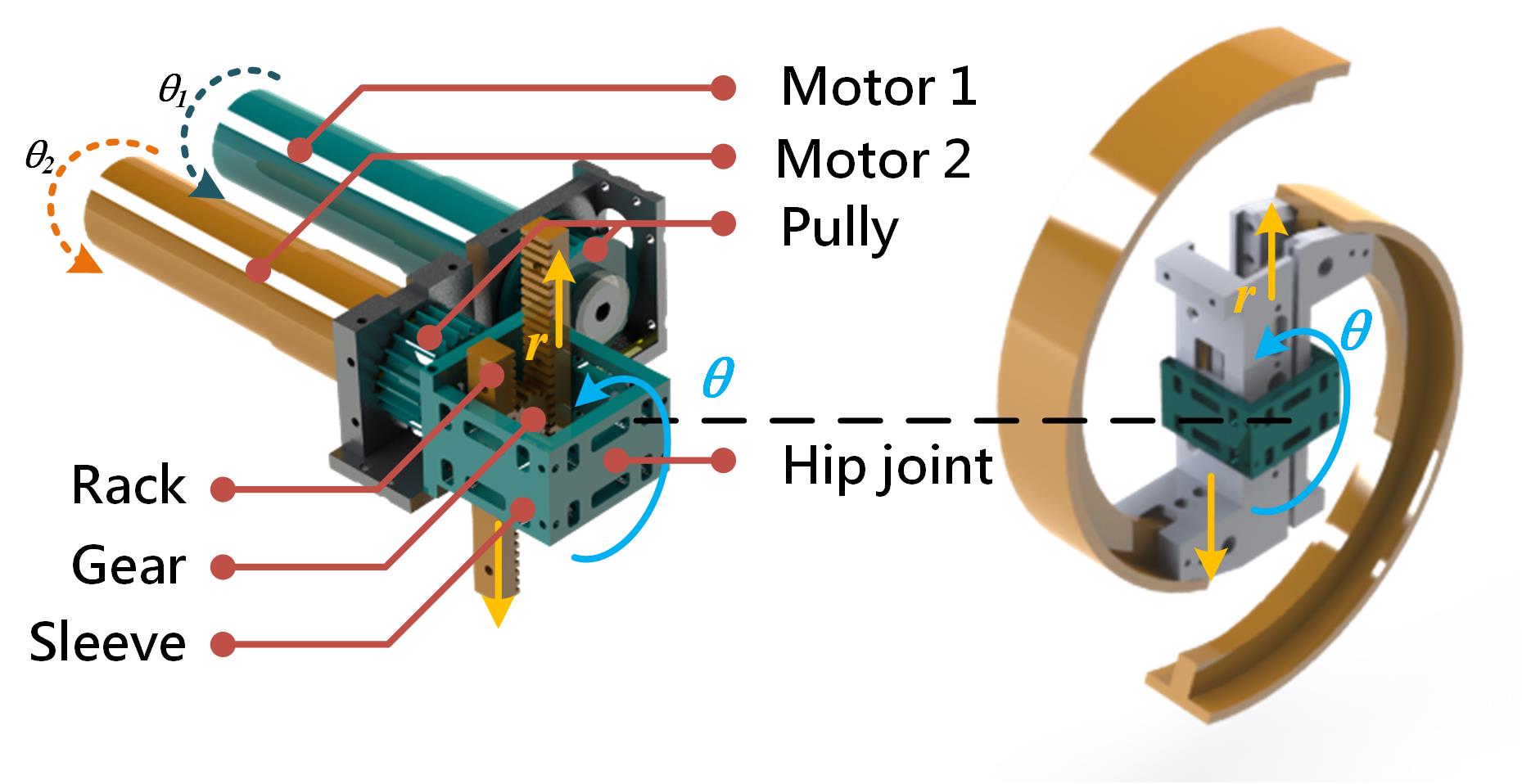
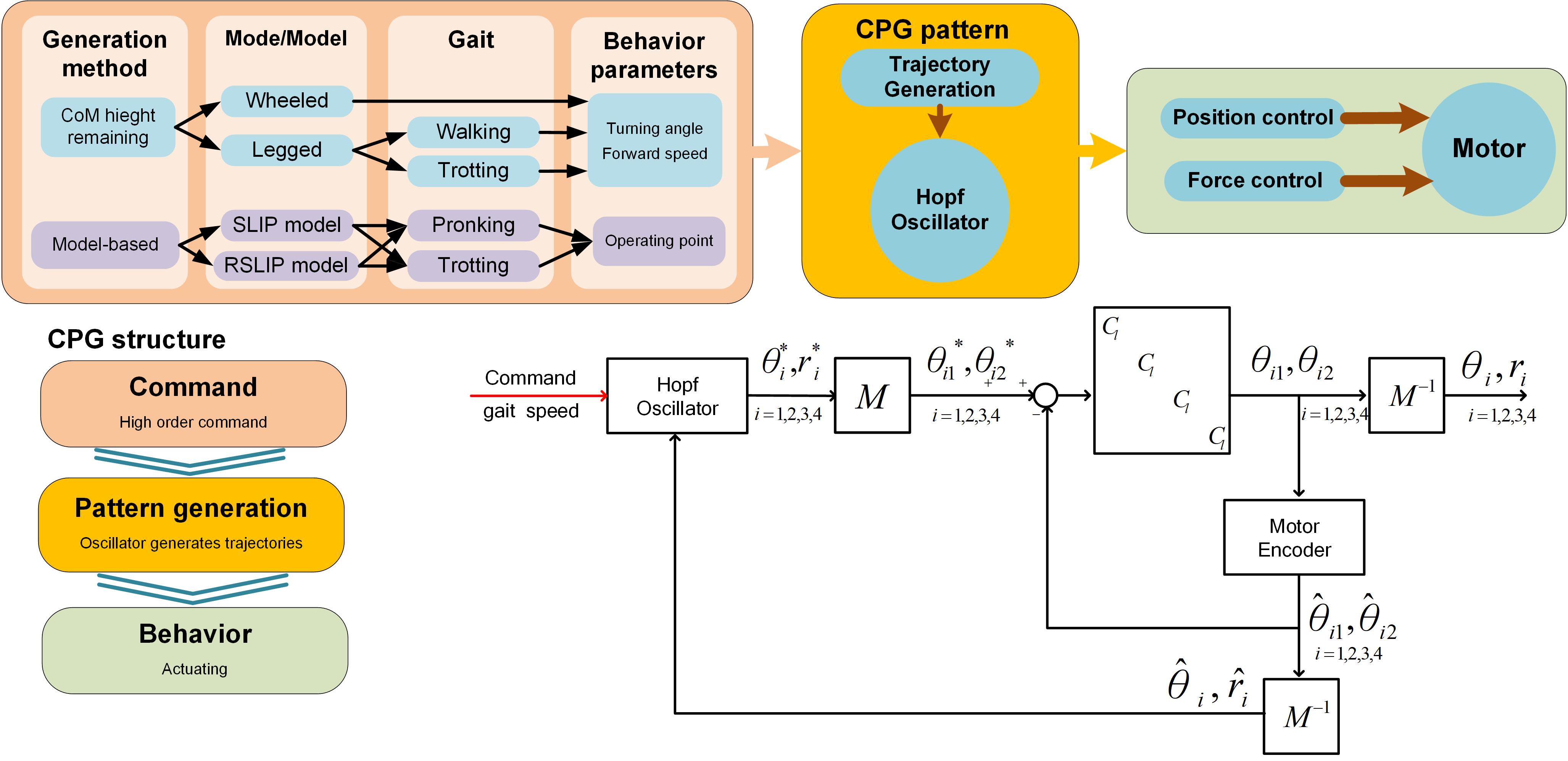
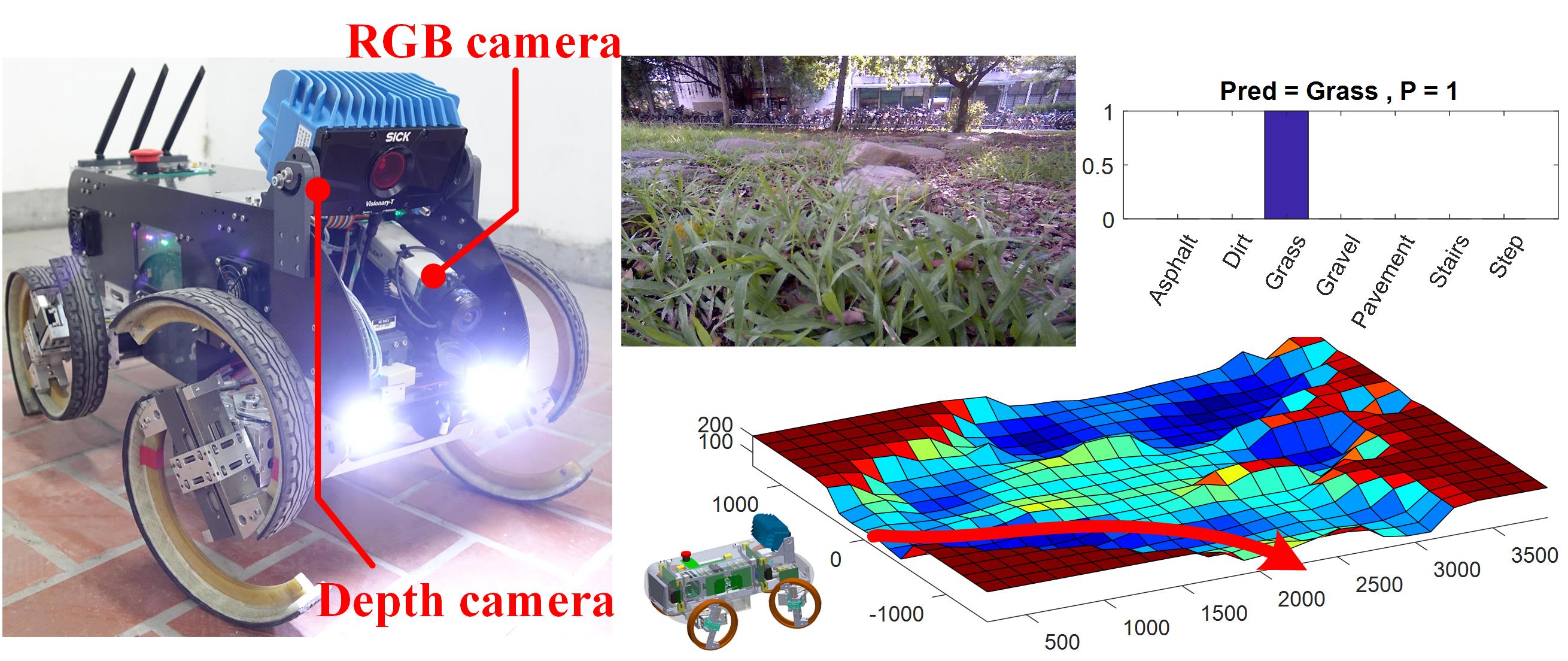
| 技術簡介 | 一個可在室內外、自然或人造環境中移動的基礎載台,其上可依需求與應用來架設感測器或機械手臂。 技術包含: 1. 創新輪腳複合機構設計,搭配仿生控制架構,使平台可在移動運行中圓滑順暢的切換不同運動模式,以達到穿越不同崎嶇地形的需求。 2.具備日夜間環境偵測功能,並智慧自主進行運動模式切換與行進方向選擇。 |
||
| 科學突破性 | "本技術於國際間機器人界中立足的特色為: 1.創新的輪腳複合設計,使機器人在輪模式和腳模式均由同一組驅動系統帶動,減少機器人結構與系統的體積重量和複雜度 2.以單一中控的仿生控制架構來達到各模式的驅動和切換,可簡化控制系統,也可使運動過程不因模式變換而需先終止再啟動 3.可在多種地形上快速和動態的運 |
||
| 產業應用性 | 本技術建構一個可在多地形上運行的「基礎載台」,可依各類型室內外需求在其上架設感測器(偵檢設備)或機械手臂(操作設備)。 |
||
| 關鍵字 | |||
- 聯絡人
- 王昱文
- 電子信箱
- futuretech.most@gmail.com
其他人也看了