



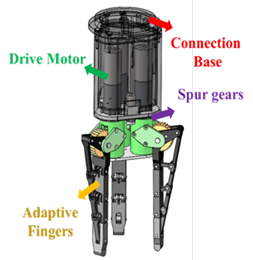

| 技術名稱 | 智慧適應性夾爪機電系統模組開發 | ||
|---|---|---|---|
| 計畫單位 | 國立清華大學 | ||
| 計畫主持人 | 張禎元 | ||
| 技術簡介 | 近年由於人力資源稀缺的影響與商業型態的轉變,使得社會上各種客製化訂單需求日趨增多,為了因應此趨勢智慧製造的概念於近年蓬勃發展。行政院智慧機械產業推動方案報告中提出一具體方向為產業智機化,其目的在於將智慧機械(包含機器人)導入至台灣各產業中,以實現高效率、高品質、高彈性之特性,來減緩勞動人口結構變遷壓 |
||
| 科學突破性 | 為能適應不同任務需求的夾爪,近幾年來已被重視與發展,目前市面上具有多自由度的機器人夾 爪主要有三家廠商,分別為 ROBOTIQ、KINOVA 以及 SCHUNK 這三家國外廠商。這三者的特色在於能在有限的機構自由度下做出多種夾取動作以利應用於夾持各式物件。應用在工業方面, 其夾爪機構重量會比應用於服 |
||
| 產業應用性 | 本研究預計產出之智慧機械夾爪,能同時具有高靈活度並具備相當的夾持力道,這項成果 預計能在未來應用於工業之中,以因應較為複雜仍須人工處理的工作,來完成產業的轉型 ,實現自動化的目的。在研究執行的過程中,自適應結構的設計、高度機電整合技術、微 小化嵌入式感測系統以及緊湊之抑振系統,對學術而言皆有相當大的 |
||
| 關鍵字 | |||
- 聯絡人
- 劉士維
- 電子信箱
- futuretech.most@gmail.com
其他人也看了