




| Technical Name | Method and system for indoor localization and tracking of a mobile robot | ||
|---|---|---|---|
| Project Operator | National Chiao Tung university | ||
| Project Host | 宋開泰 | ||
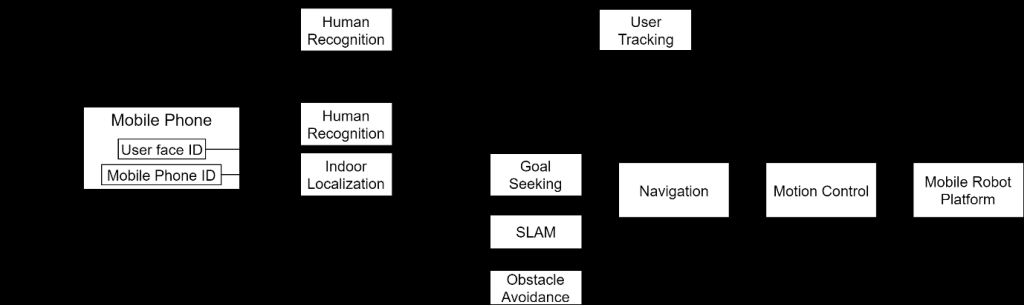
| Summary | This work combines indoor localization, face recognition and robot navigation to provide a novel human-robot interaction system. The indoor localization uses DNN and particle filter to estimate the position and face recognition provide the relative positional data between the robot and user. The robot uses this two information to move to the front of the user for providing service. |
||
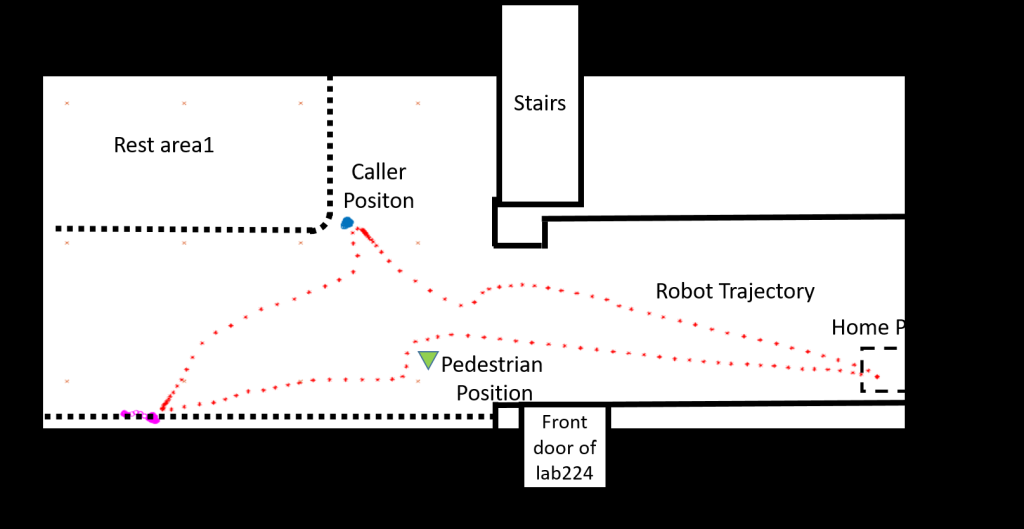
| Scientific Breakthrough | A navigation control method has been developed for a mobile robot to find and interact with an assign person. Through the APP on a mobile phone, a user can order the robot to come to him/her to provide the service, or a user can order the robot to find a specific person to conduct an assigned mission. The robot can accompany the user to provide the service by tracking the location information. |
||
| Industrial Applicability | In many applications, mobile robots need to be able to find the user who needs the service autonomously. The location of the user must be continuously updated and provided to the robot to find and track the user. The user can call the robot through the handheld device and the robot can reach the user autonomously to provide service, based on indoor localization and human recognition information. |
||
| Keyword | Indoor Localization RSSI fingerprint Service robots Deep Learning Mobile Robot Face Recognition Internet of Thing Cloud Computiong SLAM Human-Robot Interaction | ||
- kathylu.ece06g@nctu.edu.tw
other people also saw